Essence
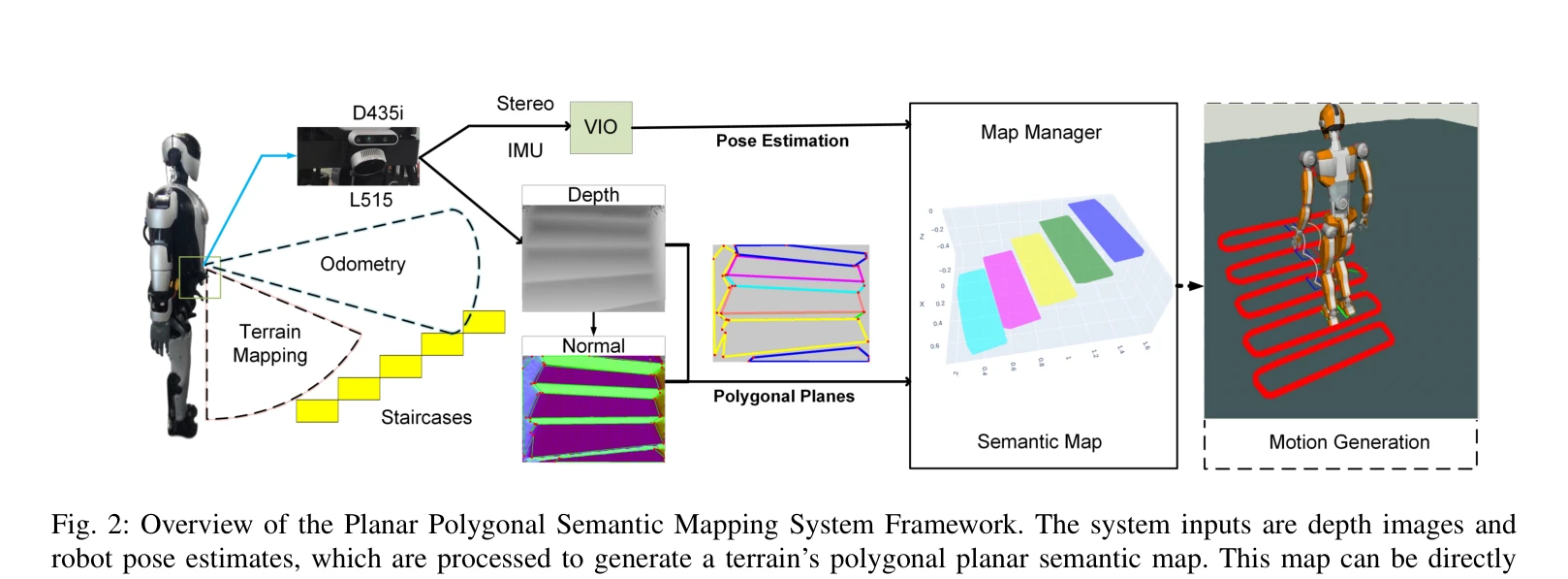
Fig. 2: Overview of the Planar Polygonal Semantic Mapping System Framework. The system inputs are depth images and
인형로봇의 계단 등반을 위해 GPU 가속 anisotropic diffusion 필터링과 RANSAC 기반 평면 추출을 활용한 실시간 다각형 의미 맵핑 알고리즘을 제시한다.
저자: Teng Bin, Jianming Yao, Tin Lun Lam, Tianwei Zhang | 날짜: 2024-11-04 | URL: https://arxiv.org/abs/2411.01919 📄 PDF
Fig. 2: Overview of the Planar Polygonal Semantic Mapping System Framework. The system inputs are depth images and
인형로봇의 계단 등반을 위해 GPU 가속 anisotropic diffusion 필터링과 RANSAC 기반 평면 추출을 활용한 실시간 다각형 의미 맵핑 알고리즘을 제시한다.
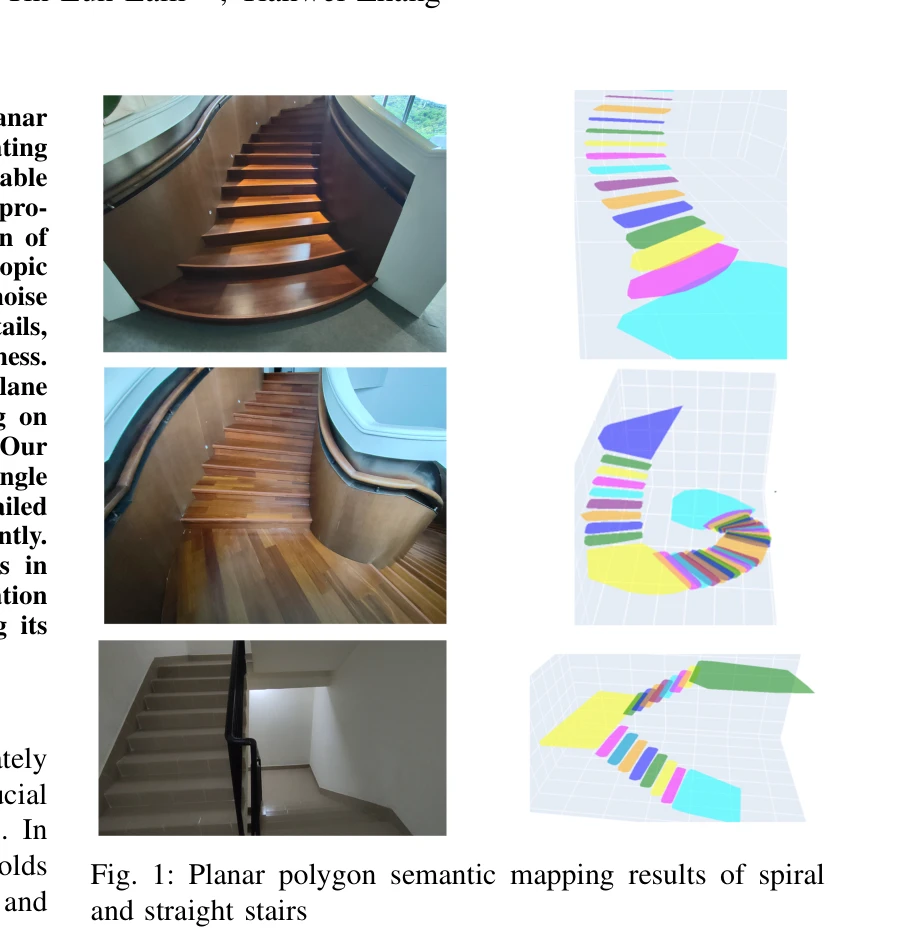
Fig. 1: Planar polygon semantic mapping results of spiral
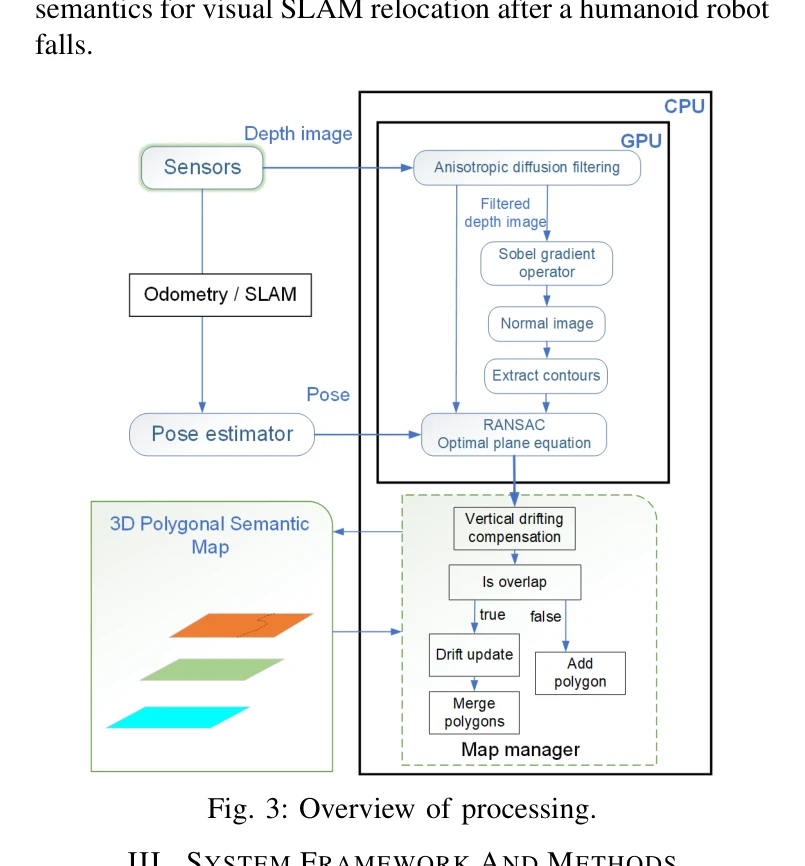
Fig. 3: Overview of processing.
총평: 본 논문은 GPU 가속을 활용한 anisotropic diffusion 필터링과 RANSAC 기반 다각형 추출을 결합하여 인형로봇의 복잡한 지형 네비게이션을 위한 실시간 의미 맵핑 문제를 효과적으로 해결했다. 시뮬레이션과 실제 센서 데이터 간의 성능 격차를 줄이고 로봇의 안전한 보행 계획을 지원하는 실용적인 시스템으로서의 가치가 크다.