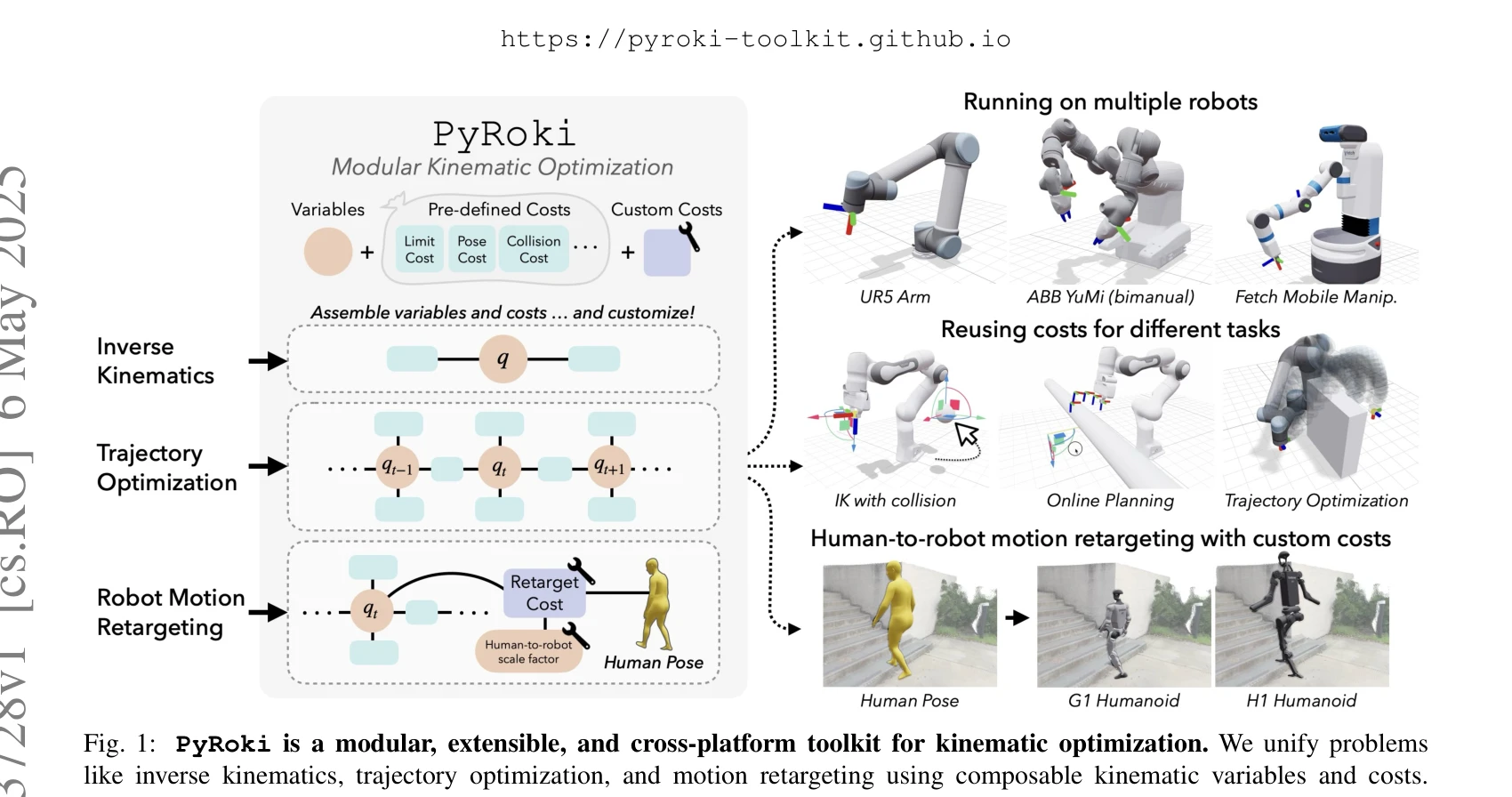
Fig. 1: PyRoki is a modular, extensible, and cross-platform toolkit for kinematic optimization. We unify problems
PyRoki는 역기구학, 궤적 최적화, 모션 리타게팅 등 다양한 로봇 운동학 최적화 문제를 통합적으로 해결하는 모듈식, 확장 가능하며 CPU/GPU/TPU에서 실행되는 크로스 플랫폼 툴킷이다.
Motivation
Known: 로봇 운동학에서 수치 최적화는 표준적 해결책이며, 역기구학(IK), 궤적 최적화(trajectory optimization), 모션 리타게팅(motion retargeting) 등 다양한 작업에 사용되어왔다. 하지만 기존 도구들은 TracIK, pink, TrajOpt, cuRobo 등 작업별로 특화되어 있다.
Gap: 기존 도구들은 작업별 C++ 루틴, CUDA 커널, 분석적 Jacobian에 의존하여 파편화되어 있으며, 새로운 목적함수 추가를 어렵게 하고 CPU 또는 GPU 중 하나만 지원한다. 다양한 로봇과 작업을 아우르면서도 크로스 플랫폼으로 실행되는 통합 프레임워크가 부재하다.
Why: 로봇 응용에서 다양한 최적화 목표(자세 오류, 속도, 충돌 회피, 인간 시연 유사성)를 유연하게 지원하고, PyTorch처럼 사용자가 쉽게 새로운 목적함수를 정의하고 실험할 수 있는 통합 프레임워크는 연구와 실제 적용 모두를 가속화할 수 있다.
Approach: PyRoki는 Levenberg-Marquardt 최적화기, 모듈식 변수 추상화(joint configuration, SE(3), SO(3) Lie group), 조합 가능한 목적함수를 설계하여 동일한 최적화 인터페이스로 다양한 작업을 통합한다. JAX 기반으로 CPU/GPU/TPU에서 자동 미분과 효율적 병렬 처리를 지원한다.
Achievement
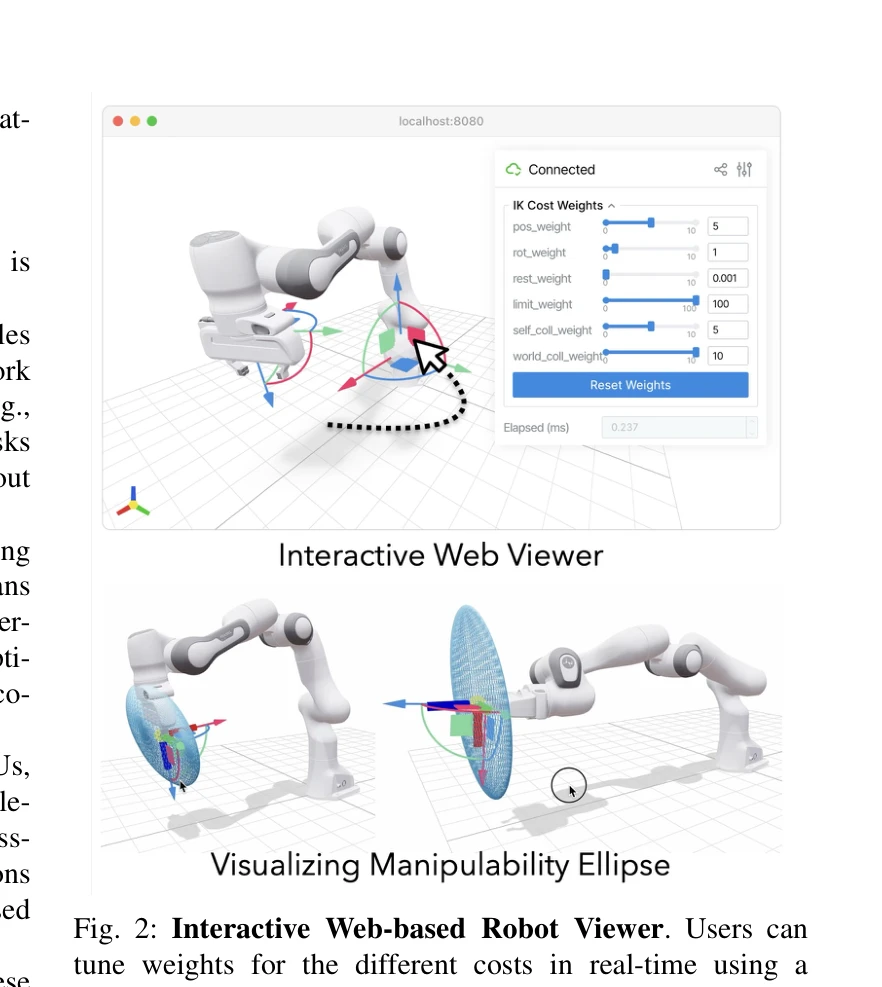
Fig. 2: Interactive Web-based Robot Viewer. Users can
모듈식 툴킷: 운동학 변수와 목적함수를 분리하여 역기구학, 궤적 최적화, 모션 리타게팅에서 재사용 가능한 컴포넌트로 설계했다. 크로스 플랫폼 지원: CPU, GPU, TPU에서 네이티브 실행이 가능하며 배치 처리 병렬화를 지원한다. 성능: 배치 역기구학에서 기존 GPU 가속 라이브러리 cuRobo 대비 1.4-1.7배 빠르고 더 낮은 오류로 수렴한다. 확장성: 자동 미분을 통한 사용자 정의 목적함수 정의를 쉽게 하면서 분석적 Jacobian도 지원한다. 시각화: 웹 기반 인터랙티브 뷰어로 비용 가중치를 실시간 조정 가능하다.
How
Fig. 2: Interactive Web-based Robot Viewer. Users can
Levenberg-Marquardt 최적화기를 JAX 기반으로 구현하여 자동 미분과 block-sparse Jacobian 계산 지원
Joint configuration 변수 추상화로 고정, 회전, 직동 관절 및 mimic joints 지원
SE(3), SO(3) Lie group 변수로 기하학적 구조를 유지하며 보간, 합성, 자세 오류 계산 수행
사전 구현된 목적함수(joint pose cost, collision cost 등) 제공 및 사용자 정의 비용함수 조합 가능
JAX의 자동 미분으로 Jacobian 자동 계산하며 필요시 분석적 Jacobian 교체 가능
웹 기반 시각화 도구(viser 기반)로 비용 가중치 실시간 조정 및 조작성 타원체 표시
Originality
역기구학, 궤적 최적화, 모션 리타게팅을 통합된 목적함수 프레임워크로 재정의하여 문제의 공통 구조를 드러냄
PyTorch 스타일의 모듈형 API 설계로 로봇 운동학 최적화를 민주화하는 새로운 접근
Lie group 변수 추상화로 기하학적 구조를 존중하면서도 사용 편의성 제공
단일 프레임워크에서 CPU/GPU/TPU 크로스 플랫폼 지원으로 기존 도구들의 제약 극복
인터랙티브 웹 기반 시각화로 cost weight tuning을 직관적으로 지원하는 독창적 설계
Limitation & Further Study
하드 제약(joint limits, 접촉 회피)을 직접 처리하지 않고 미분 가능한 페널티로 표현하므로 엄격한 제약이 필요한 경우 부족할 수 있음
Levenberg-Marquardt 최적화기만 지원하므로 다른 최적화 알고리즘(BFGS, trust region 등) 선택 불가
논문에서 분석적 Jacobian 작성의 복잡도나 자동 미분 성능 오버헤드에 대한 상세한 비교 분석 부족
실제 로봇 하드웨어 제약(actuator limits, friction 등)을 명시적으로 모델링하는 기능 정보 부재
후속 연구로 다양한 최적화 알고리즘 지원, 학습 기반 초기값 제공, 실시간 제약 처리 개선이 필요함
총평: PyRoki는 로봇 운동학 최적화를 위한 통합된 모듈식 프레임워크로서 파편화된 기존 도구들의 문제를 효과적으로 해결하고, CPU/GPU/TPU 크로스 플랫폼 지원과 cuRobo 대비 1.4-1.7배 성능 향상을 달성하였다. 인터랙티브 시각화와 사용 편의성을 갖춘 실용적인 오픈소스 도구로서 높은 연구 및 산업 가치가 있다.