저자: Yubiao Ma, Han Yu, Jiayin Xie, Changtai Lv, Qiang Luo, Chi Zhang, Yunpeng Yin, Boyang Xing, Xuemei Ren, Dongdong Zheng | 날짜: 2026-01-30 | DOI: 10.48550/arXiv.2601.23080 📄 PDF
Essence
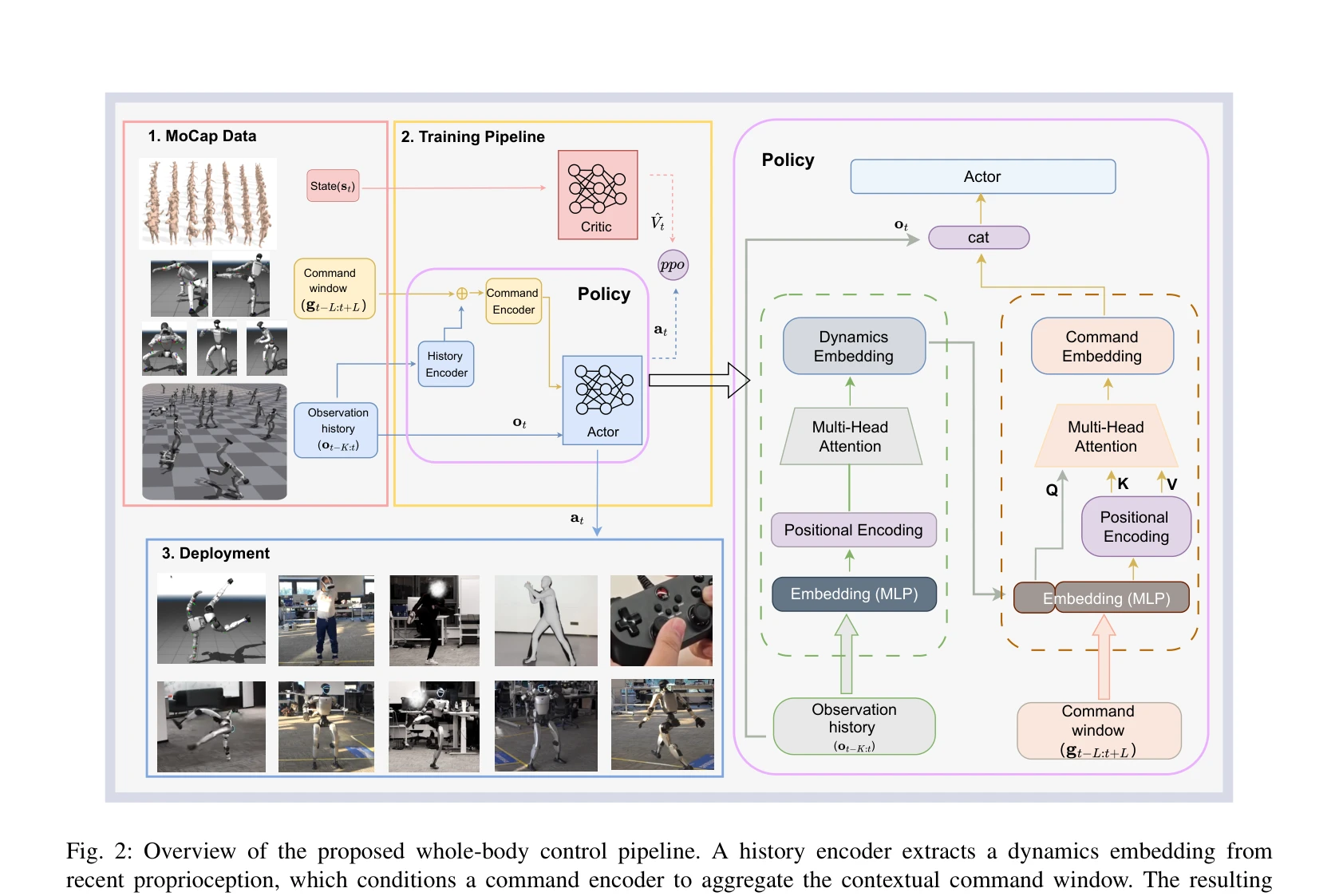
Fig. 2: Overview of the proposed whole-body control pipeline. A history encoder extracts a dynamics embedding from
휴머노이드 로봇의 일반적인 전신 제어를 위해 dynamics-conditioned command aggregation 프레임워크를 제안하며, 인과적 temporal encoder와 multi-head cross-attention을 결합하여 노이즈가 있는 참조 동작에 강건하게 대응한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 dynamics-conditioned command aggregation이라는 우아한 설계를 통해 컴팩트한 데이터셋으로도 강건한 일반화 휴머노이드 전신 제어를 달성하며, 낙하 회복의 통합과 실제 로봇 배포 검증으로 높은 실용성을 보여준다.