Essence
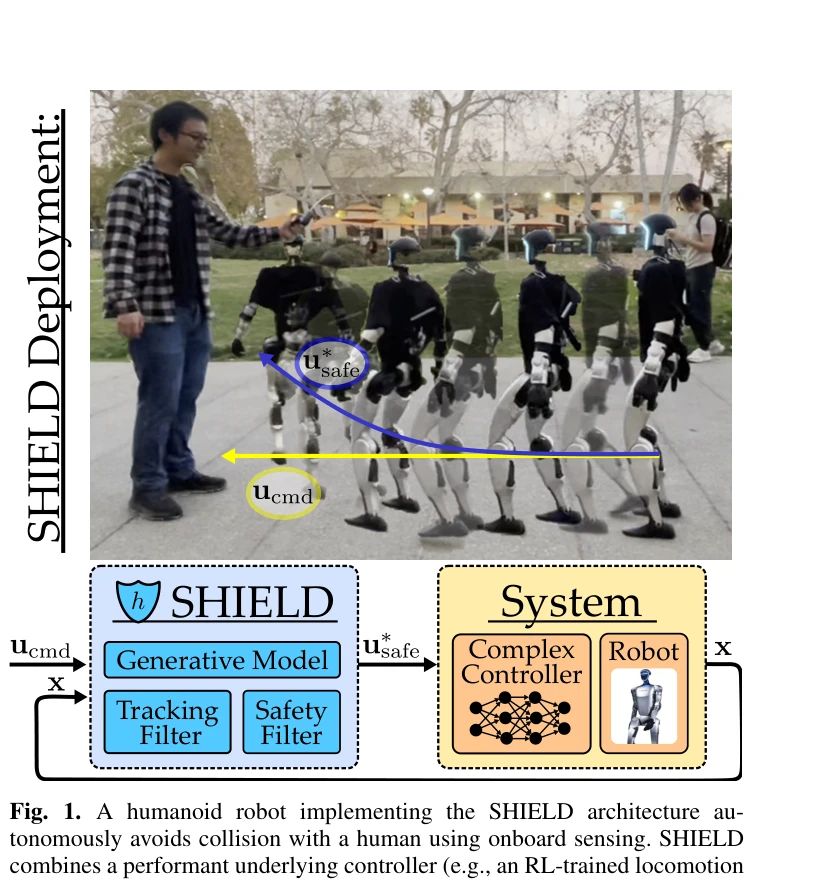
Fig. 1. A humanoid robot implementing the SHIELD architecture au-
SHIELD는 학습 기반 휴머노이드 로봇 컨트롤러에 안전 계층을 추가하여 실시간 제약 조건 명시와 확률적 안전 보장을 동시에 제공하는 프레임워크이다. 동적 잔차 모델과 확률적 이산 시간 제어 배리어 함수(S-DTCBF)를 통해 기존 블랙박스 RL 정책을 재학습 없이 안전화한다.
저자: Lizhi Yang, Blake Werner, Ryan K. Cosner, David Fridovich-Keil, Preston Culbertson, Aaron D. Ames | 날짜: 2025-05-16 | URL: https://arxiv.org/abs/2505.11494 📄 PDF
Fig. 1. A humanoid robot implementing the SHIELD architecture au-
SHIELD는 학습 기반 휴머노이드 로봇 컨트롤러에 안전 계층을 추가하여 실시간 제약 조건 명시와 확률적 안전 보장을 동시에 제공하는 프레임워크이다. 동적 잔차 모델과 확률적 이산 시간 제어 배리어 함수(S-DTCBF)를 통해 기존 블랙박스 RL 정책을 재학습 없이 안전화한다.
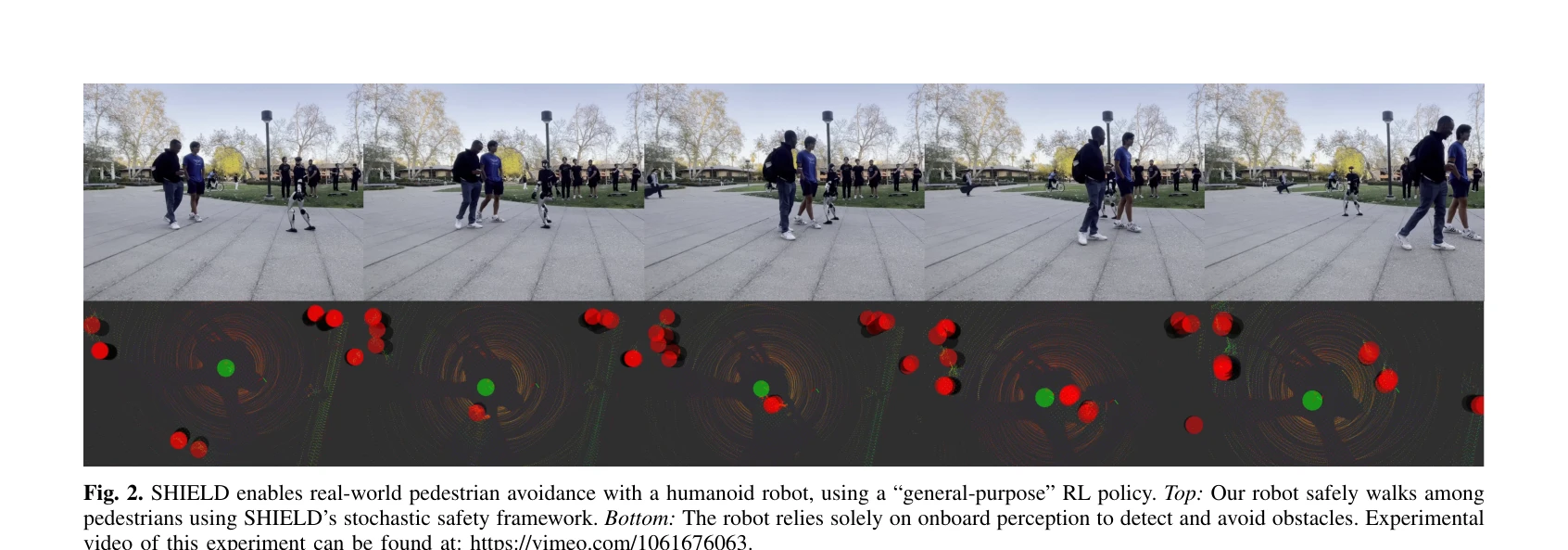
Fig. 2. SHIELD enables real-world pedestrian avoidance with a humanoid robot, using a “general-purpose” RL policy. Top:
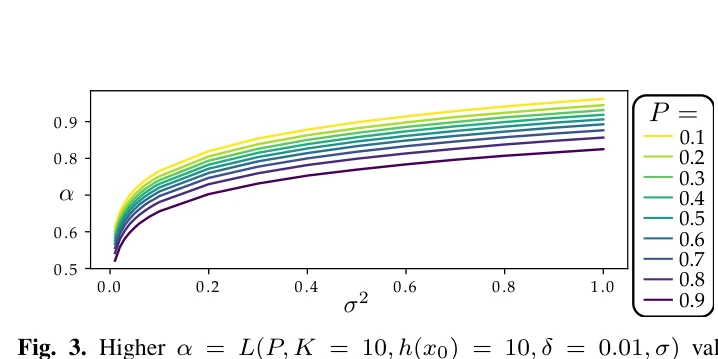
Fig. 3. Higher α = L(P, K = 10, h(x0) = 10, δ = 0.01, σ) values
총평: SHIELD는 학습 기반 humanoid 컨트롤러의 실제 배포를 위한 현실적이고 실용적인 안전 보장 방법을 제시하며, 데이터 기반과 모델 기반 방법의 간격을 효과적으로 연결한다. 실제 로봇 실험 검증과 함께 이론적 안전 보장을 제공하여 로봇 안전 연구에 상당한 기여를 한다.