Essence
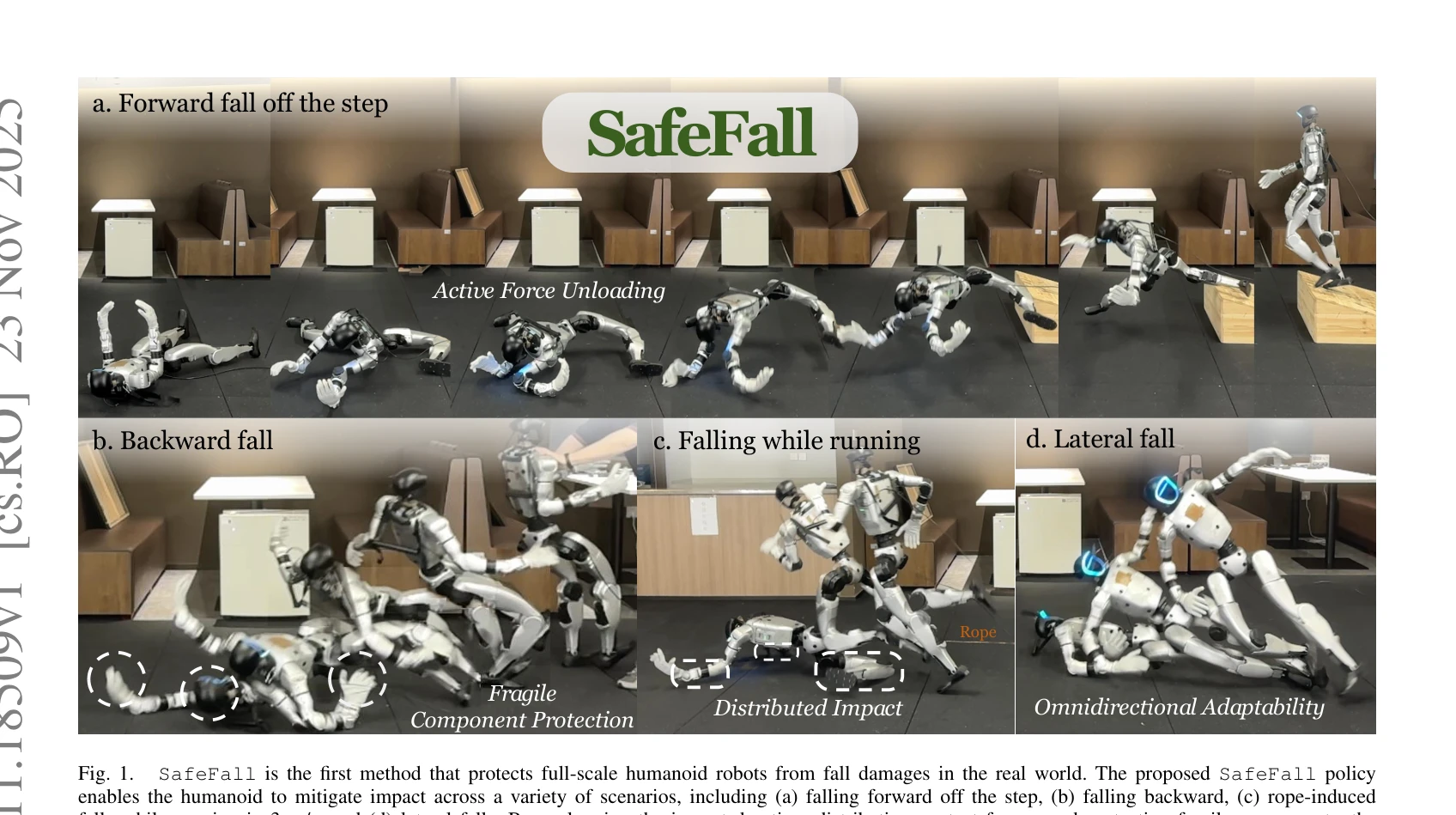
Fig. 1.
SafeFall은 휴머노이드 로봇의 낙상을 예측하고 손상 최소화 제어를 학습하는 프레임워크로, GRU 기반 낙상 예측기와 강화학습 정책을 결합하여 로봇의 구조적 취약성을 고려한 보호 행동을 실행한다.
저자: Ziyu Meng, Tengyu Liu, Le Ma, Yingying Wu, Ran Song, Wei Zhang, Siyuan Huang | 날짜: 2025-11-23 | DOI: 10.48550/arXiv.2511.18509 📄 PDF
Fig. 1.
SafeFall은 휴머노이드 로봇의 낙상을 예측하고 손상 최소화 제어를 학습하는 프레임워크로, GRU 기반 낙상 예측기와 강화학습 정책을 결합하여 로봇의 구조적 취약성을 고려한 보호 행동을 실행한다.
Fig. 1.
총평: SafeFall은 휴머노이드 로봇의 실제 배포를 가로막던 낙상 손상 문제를 처음으로 체계적으로 해결하는 프레임워크로, 강화학습과 손상 인식 설계를 결합하여 의미 있는 성능 개선을 달성했으며, 기존 제어기와의 무간섭 통합으로 즉시 실용성이 높다.