Essence
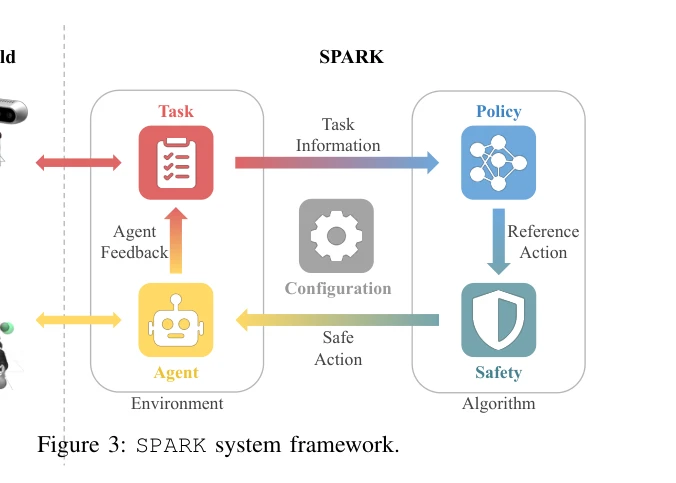
Figure 3: SPARK system framework.
SPARK는 휴머노이드 로봇의 안전한 자율 제어와 원격 조종을 위한 포괄적인 벤치마크 프레임워크로, 모듈식 안전 제어 알고리즘과 시뮬레이션 환경을 제공하여 비전문가도 안전 컨트롤러를 효율적으로 설계하고 배포할 수 있도록 지원한다.
저자: Yifan Sun, Rui Chen, Kai S. Yun, Yikuan Fang, Sebin Jung, Feihan Li, Bowei Li, Weiye Zhao, Changliu Liu | 날짜: 2025-02-05 | URL: https://arxiv.org/abs/2502.03132 📄 PDF
Figure 3: SPARK system framework.
SPARK는 휴머노이드 로봇의 안전한 자율 제어와 원격 조종을 위한 포괄적인 벤치마크 프레임워크로, 모듈식 안전 제어 알고리즘과 시뮬레이션 환경을 제공하여 비전문가도 안전 컨트롤러를 효율적으로 설계하고 배포할 수 있도록 지원한다.
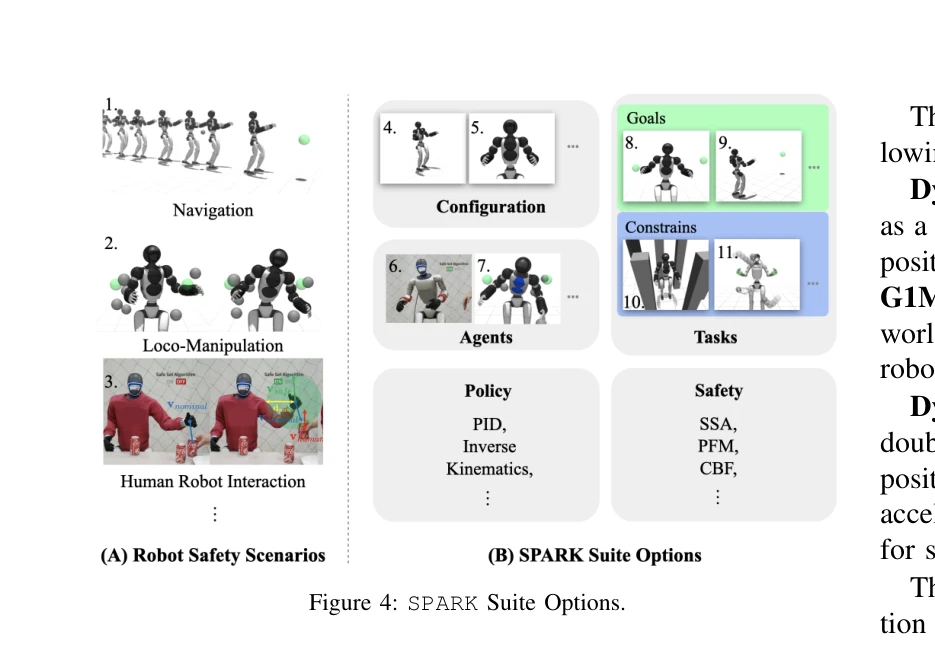
Figure 4: SPARK Suite Options.
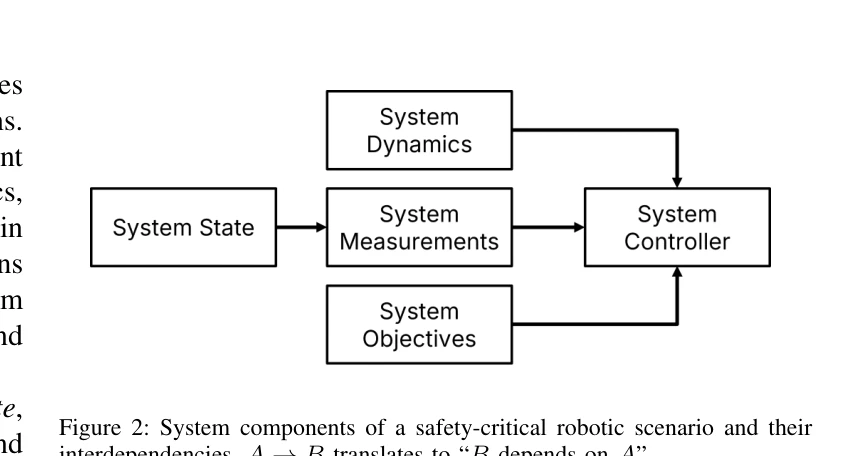
Figure 2: System components of a safety-critical robotic scenario and their
총평: SPARK는 휴머노이드 로봇의 안전한 제어를 위한 실질적이고 체계적인 프레임워크를 제시하는 높은 가치의 연구로, 모듈식 설계, 벤치마크 제공, 실제 배포 검증을 통해 안전 로봇 연구를 가속화할 수 있는 견고한 기반을 마련했다.