Essence
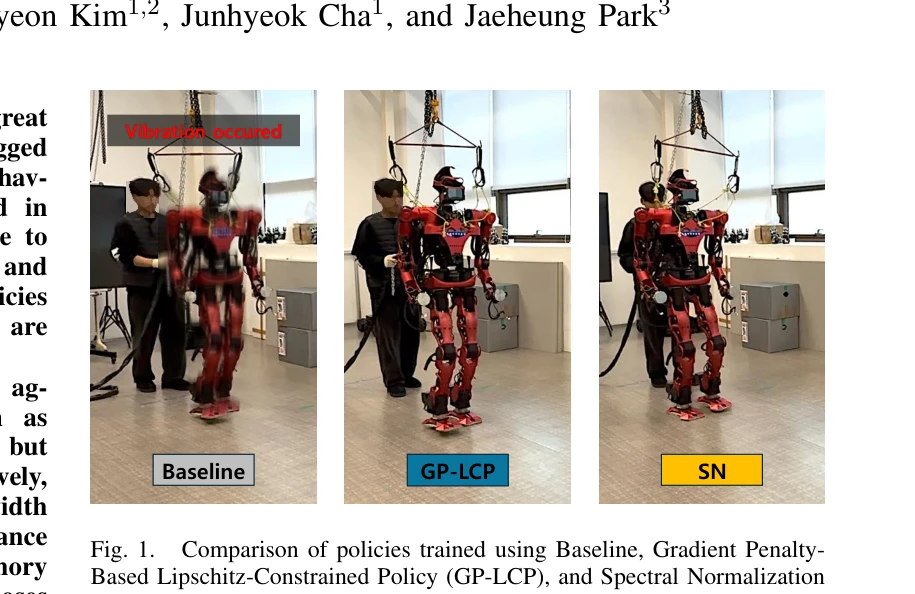
Fig. 1.
본 논문은 인간형 로봇의 보행 학습에서 Spectral Normalization (SN)을 사용하여 Lipschitz 연속성을 효율적으로 강제하고, 기존의 gradient penalty 기반 방법보다 GPU 메모리 오버헤드를 줄이면서도 유사한 성능을 달성한다.
저자: Jaeyong Shin, Woohyun Cha, Donghyeon Kim, Junhyeok Cha, Jaeheung Park | 날짜: 2025-04-11 | URL: https://arxiv.org/abs/2504.08246 📄 PDF
Fig. 1.
본 논문은 인간형 로봇의 보행 학습에서 Spectral Normalization (SN)을 사용하여 Lipschitz 연속성을 효율적으로 강제하고, 기존의 gradient penalty 기반 방법보다 GPU 메모리 오버헤드를 줄이면서도 유사한 성능을 달성한다.
Fig. 1.
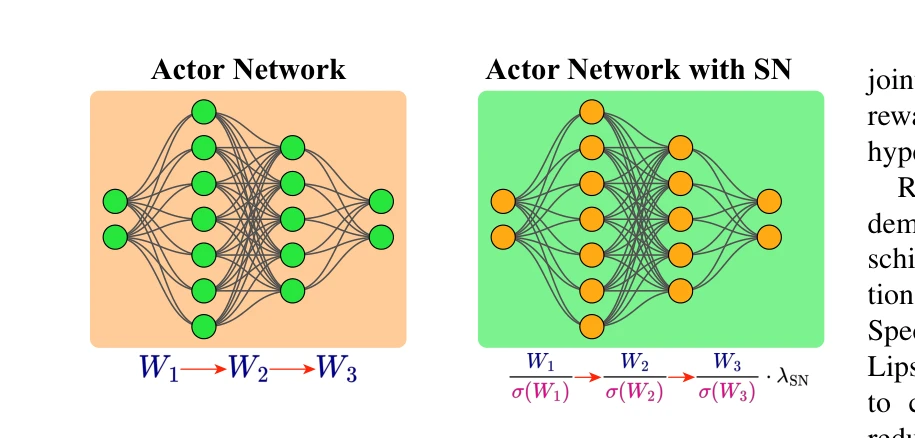
Fig. 2. Comparison between a standard actor network and an actor network
총평: 본 논문은 Spectral Normalization이라는 기존 기법을 로봇 정책 학습의 대역폭 제약 문제에 창의적으로 적용하여, 계산 효율성과 성능을 모두 달성한 실용적인 솔루션을 제시한다. 시뮬레이션과 실제 로봇 양쪽에서의 검증으로 신뢰성을 높였으며, sim-to-real 전이 문제 해결에 중요한 기여를 한다.