Essence
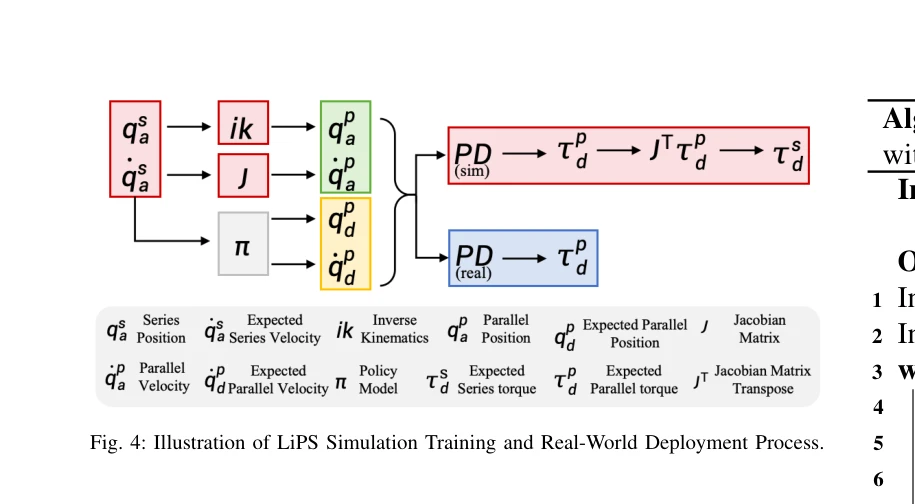
Fig. 4: Illustration of LiPS Simulation Training and Real-World Deployment Process.
LiPS는 GPU 기반 병렬 훈련 환경에서 URDF 형식의 휴머노이드 로봇을 위한 강화학습 방법으로, 멀티-리지드바디 폐루프 동역학 모델링을 통해 시뮬레이션-현실 간 격차를 줄인다.
저자: Qiang Zhang, Gang Han, Jingkai Sun, Wen Zhao, Jiahang Cao, Jiaxu Wang, Hao Cheng, Lingfeng Zhang, Yijie Guo, Renjing Xu | 날짜: 2025-03-11 | URL: https://arxiv.org/abs/2503.08349 📄 PDF
Fig. 4: Illustration of LiPS Simulation Training and Real-World Deployment Process.
LiPS는 GPU 기반 병렬 훈련 환경에서 URDF 형식의 휴머노이드 로봇을 위한 강화학습 방법으로, 멀티-리지드바디 폐루프 동역학 모델링을 통해 시뮬레이션-현실 간 격차를 줄인다.
Fig. 4: Illustration of LiPS Simulation Training and Real-World Deployment Process.
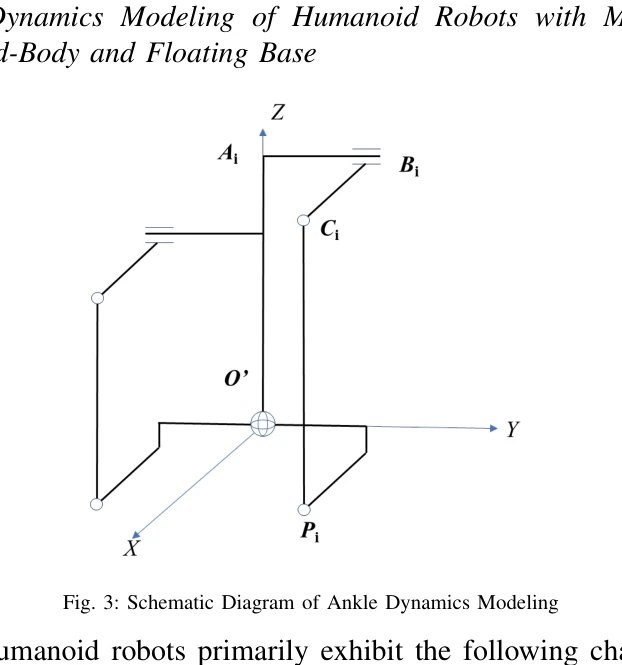
Fig. 3: Schematic Diagram of Ankle Dynamics Modeling
총평: LiPS는 휴머노이드 로봇의 GPU 병렬 강화학습에서 sim2real 격차를 크게 줄이는 실질적이고 실용적인 방법으로, URDF 기반 복잡한 로봇 제어 연구에 중요한 기여를 한다. 다만 광범위한 실제 로봇 검증과 다양한 시뮬레이션 플랫폼으로의 확장 연구가 필요하다.