Essence
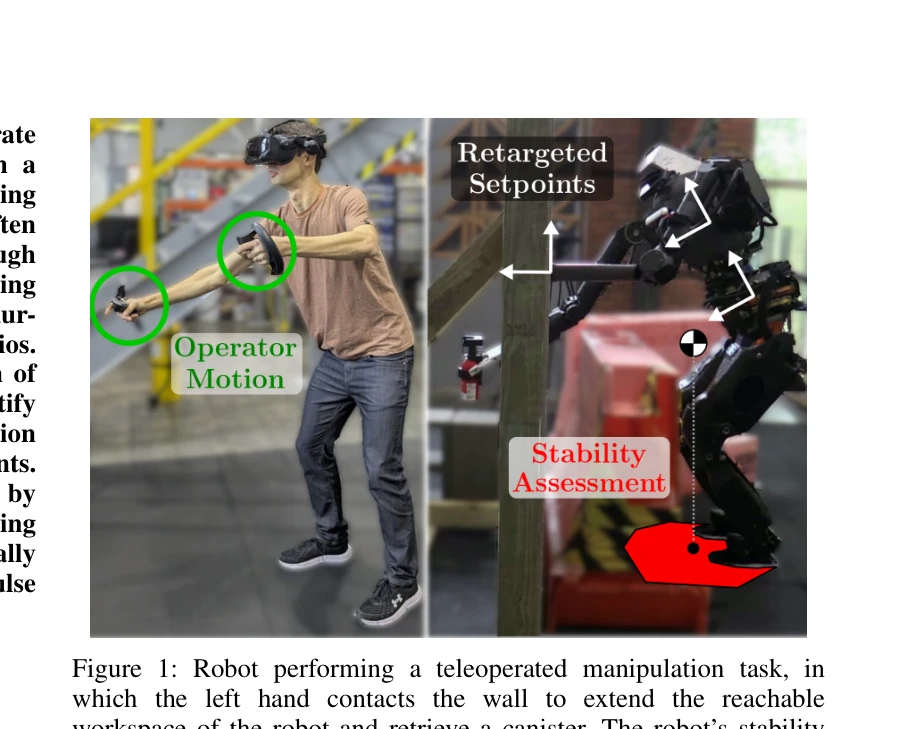
Figure 1: Robot performing a teleoperated manipulation task, in
휴머노이드 로봇의 다중 접촉 텔레오퍼레이션 중 안정성을 향상시키기 위해 Centroidal stability 기반 retargeting을 제안하며, Linear Program 민감도 분석을 통해 효율적으로 안정성 여유 기울기를 계산한다.
저자: Stephen McCrory, Romeo Orsolino, Dhruv Thanki, Luigi Penco, Robert Griffin | 날짜: 2025-10-05 | URL: https://arxiv.org/abs/2510.04353 📄 PDF
Figure 1: Robot performing a teleoperated manipulation task, in
휴머노이드 로봇의 다중 접촉 텔레오퍼레이션 중 안정성을 향상시키기 위해 Centroidal stability 기반 retargeting을 제안하며, Linear Program 민감도 분석을 통해 효율적으로 안정성 여유 기울기를 계산한다.
Figure 1: Robot performing a teleoperated manipulation task, in
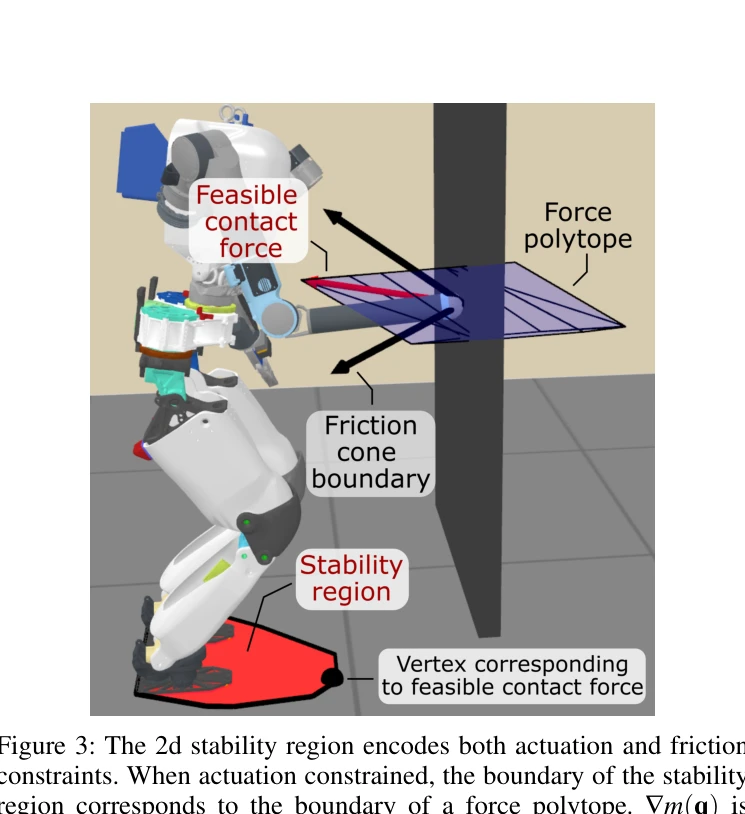
Figure 3: The 2d stability region encodes both actuation and friction
총평: 다중 접촉 텔레오퍼레이션에 centroidal 안정성 분석을 효과적으로 통합하고 LP 민감도를 통한 새로운 기울기 계산 방법을 제시하며, 시뮬레이션과 하드웨어 검증으로 실용성을 입증한 견고한 기여.