Essence
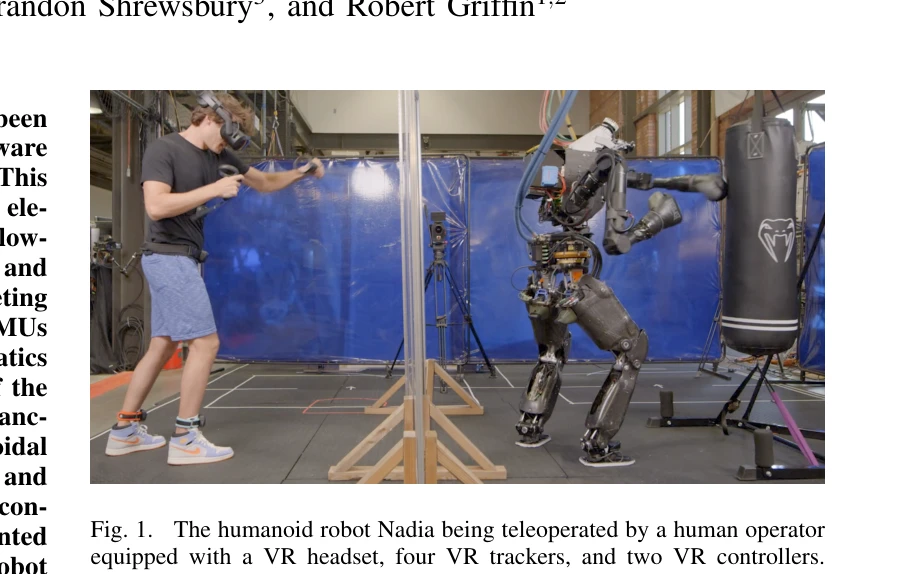
Fig. 1.
본 논문은 7개의 IMU 기반 캘리브레이션 무료 모션 캡처, low-latency kinematics streaming toolbox, 고대역폭 cycloidal actuator를 통합하여 휴머노이드 로봇의 고속 및 충격 강건 텔레오퍼레이션을 실현한다.
저자: Sylvain Bertrand, Luigi Penco, Dexton Anderson, Duncan Calvert, Valentine Roy, Stephen McCrory, Khizar Mohammed, Sebastian Sanchez, Will Griffith, Steve Morfey, Alexis Maslyczyk, Achintya Mohan, Cody Castello, Bingyin Ma, Kartik Suryavanshi, Patrick Dills, Jerry Pratt, Victor Ragusila, Brandon Shrewsbury, Robert Griffin | 날짜: 2024-09-06 | URL: https://arxiv.org/abs/2409.04639 📄 PDF
Fig. 1.
본 논문은 7개의 IMU 기반 캘리브레이션 무료 모션 캡처, low-latency kinematics streaming toolbox, 고대역폭 cycloidal actuator를 통합하여 휴머노이드 로봇의 고속 및 충격 강건 텔레오퍼레이션을 실현한다.
Fig. 1.
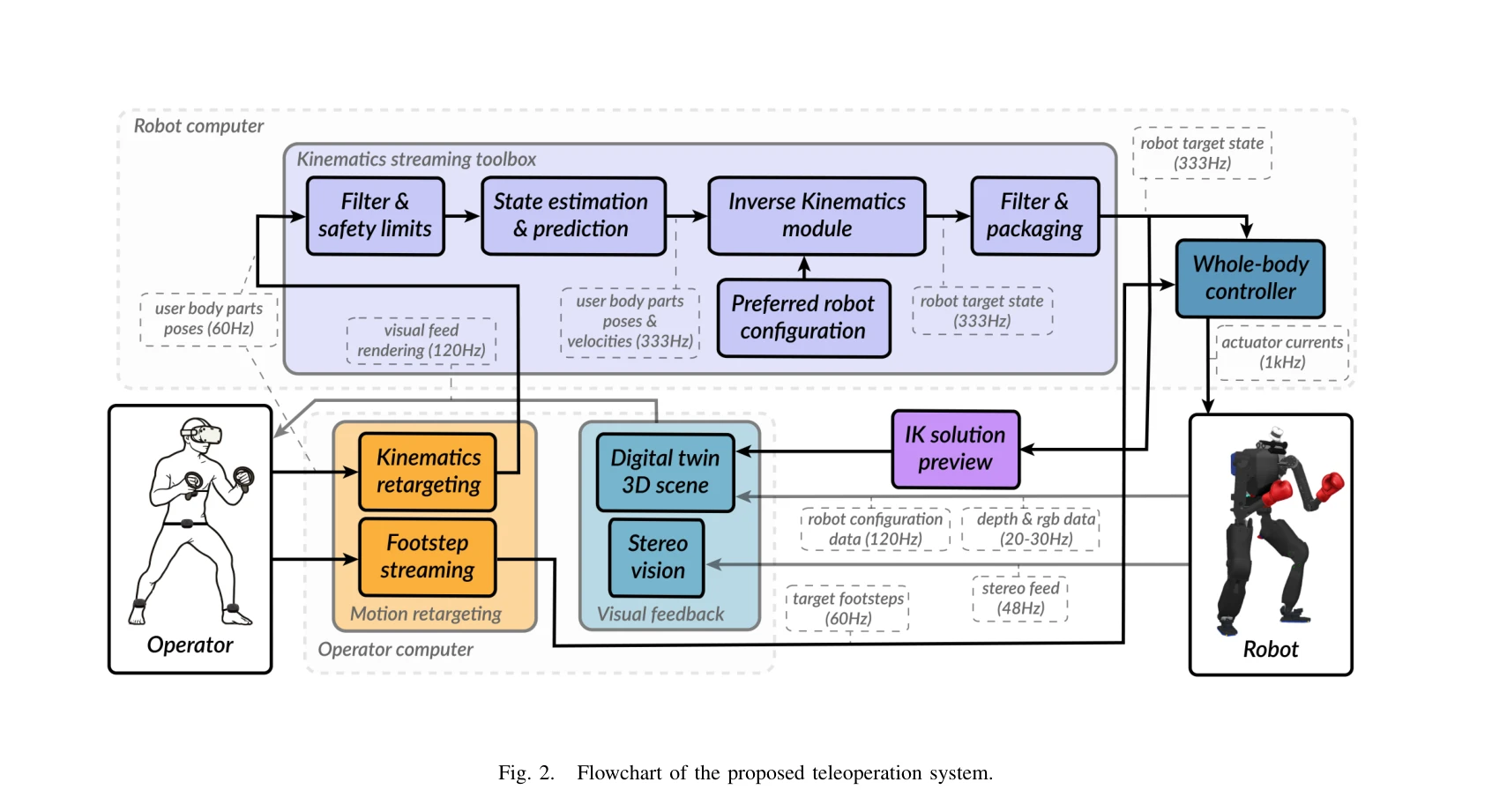
Fig. 2.
총평: 본 논문은 최소 센서 기반 모션 캡처, low-latency streaming, cycloidal actuator를 통합하여 휴머노이드 로봇의 고속 충격 강건 텔레오퍼레이션을 처음으로 실제 구현 및 검증했으며, 간단하면서도 효과적인 설계로 실용적 가치가 높다. 다만 플랫폼 특화성과 환경 다양성 평가 부재가 한계이다.