Essence
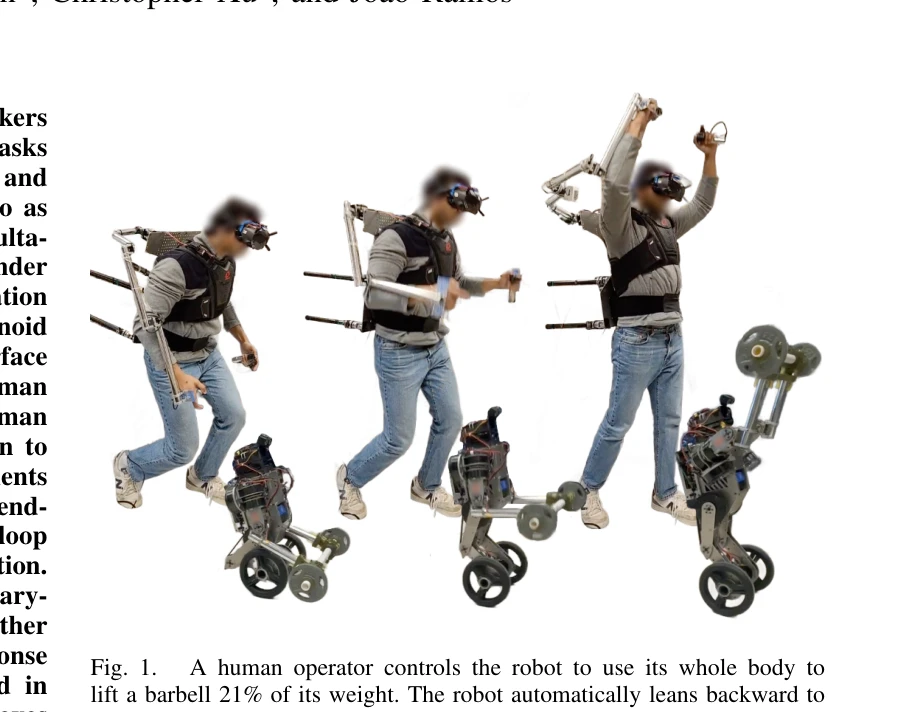
Fig. 1.
휠형 휴머노이드 로봇의 Dynamic Mobile Manipulation을 위해 햅틱 피드백을 통한 원격 조종 프레임워크를 제시하며, 인간의 전신 모션을 로봇에 재타겟팅하여 무거운 물체 들어올리기를 수행한다.
저자: Amartya Purushottam, Jack Yan, Christopher Yu, Joao Ramos | 날짜: 2025-05-26 | URL: https://arxiv.org/abs/2505.19530 📄 PDF
Fig. 1.
휠형 휴머노이드 로봇의 Dynamic Mobile Manipulation을 위해 햅틱 피드백을 통한 원격 조종 프레임워크를 제시하며, 인간의 전신 모션을 로봇에 재타겟팅하여 무거운 물체 들어올리기를 수행한다.
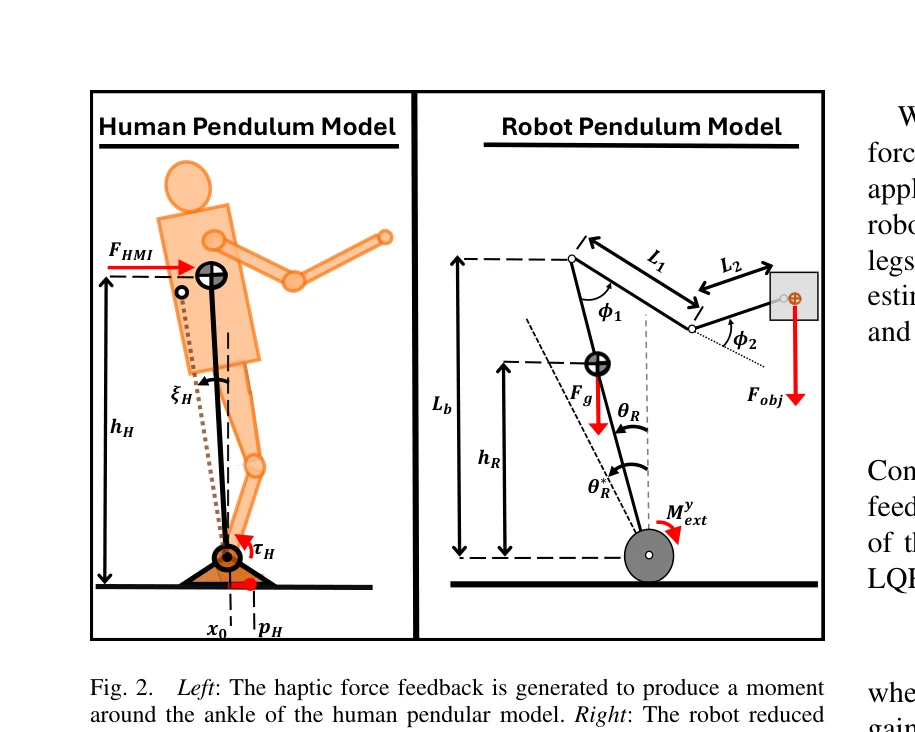
Fig. 2.
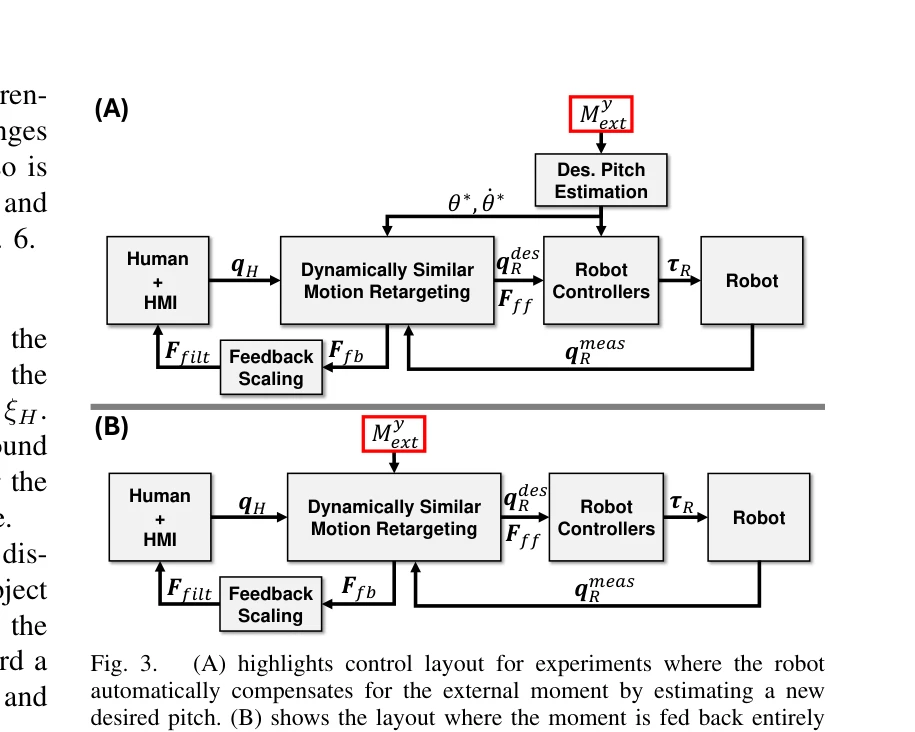
Fig. 3.
총평: 본 논문은 무거운 물체 들어올리기 작업을 위한 휠형 휴머노이드의 원격 조종에서 높이 조절, 자동 pitch 보상, 햅틱 피드백을 통합한 실질적이고 잘 설계된 시스템을 제시하며, 기존 연구의 명확한 한계를 극복한 의미 있는 기여이다.