Essence
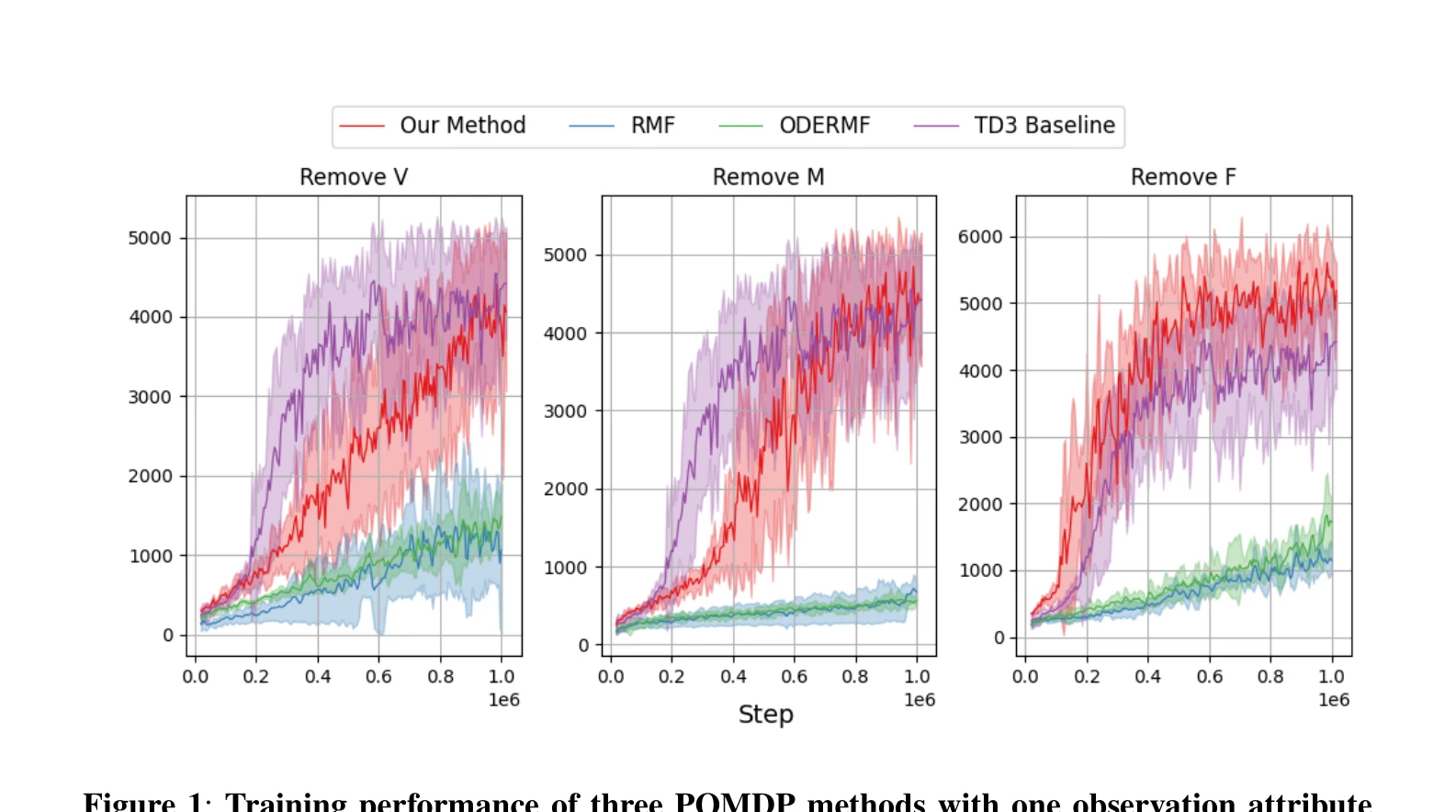
Figure 1 summarizes the training performance under three partial observability configurations:
부분 관찰 환경에서 고정 길이 과거 관찰 시퀀스를 병렬로 처리하는 novel history encoder를 제안하여, Gymnasium Humanoid-v4 환경에서 부분 관찰 하에서의 안정적인 humanoid 정책 학습을 처음으로 성공시켰다.
저자: Wuhao Wang, Zhiyong Chen | 날짜: 2025-07-25 | URL: https://arxiv.org/abs/2507.18883 📄 PDF
Figure 1 summarizes the training performance under three partial observability configurations:
부분 관찰 환경에서 고정 길이 과거 관찰 시퀀스를 병렬로 처리하는 novel history encoder를 제안하여, Gymnasium Humanoid-v4 환경에서 부분 관찰 하에서의 안정적인 humanoid 정책 학습을 처음으로 성공시켰다.
총평: 본 연구는 부분 관찰 환경에서의 고차원 humanoid 제어라는 미해결 문제를 처음으로 성공적으로 해결하며, 병렬 history encoder를 통해 기존 RNN 기반 메모리 방법들을 압도적으로 능가한다. 다만 방법론의 구체적 설명이 부족하고 실제 로봇 검증이 필요하다.