Essence
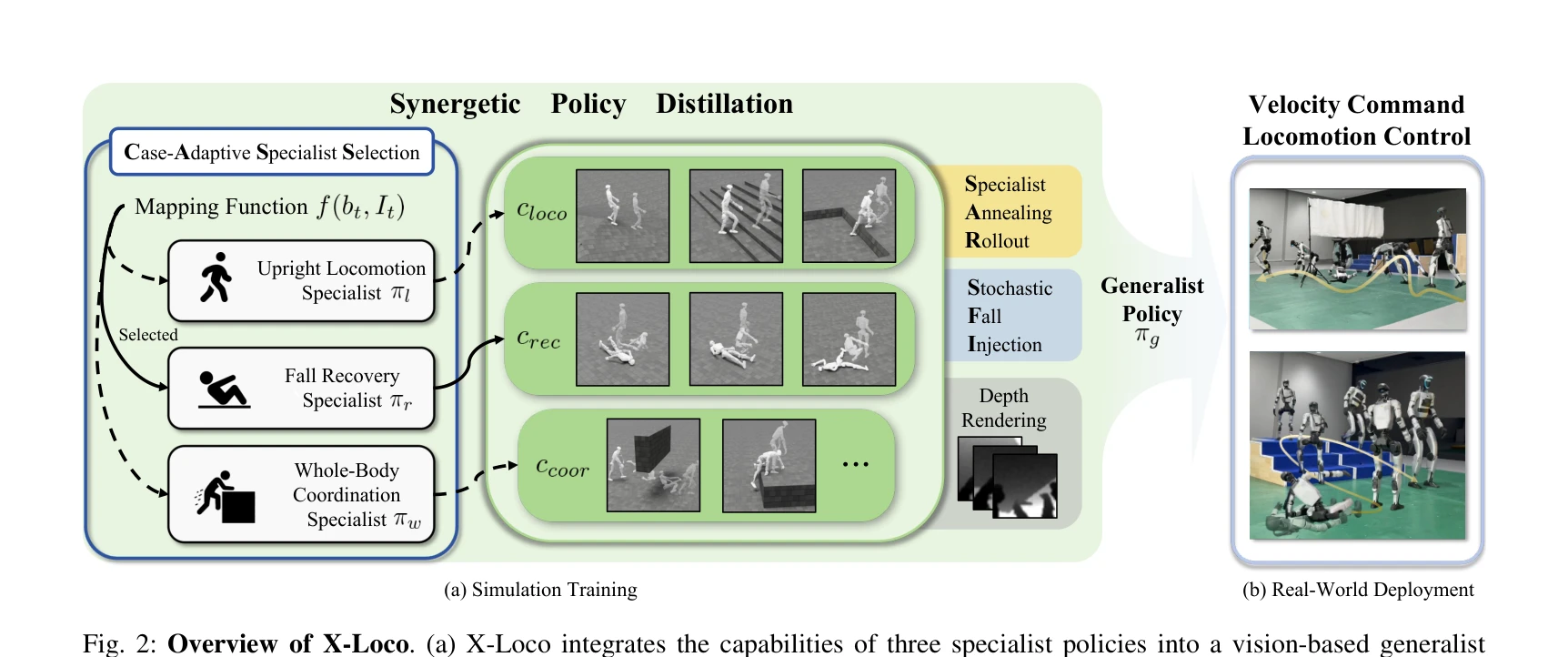
Fig. 2: Overview of X-Loco. (a) X-Loco integrates the capabilities of three specialist policies into a vision-based gene
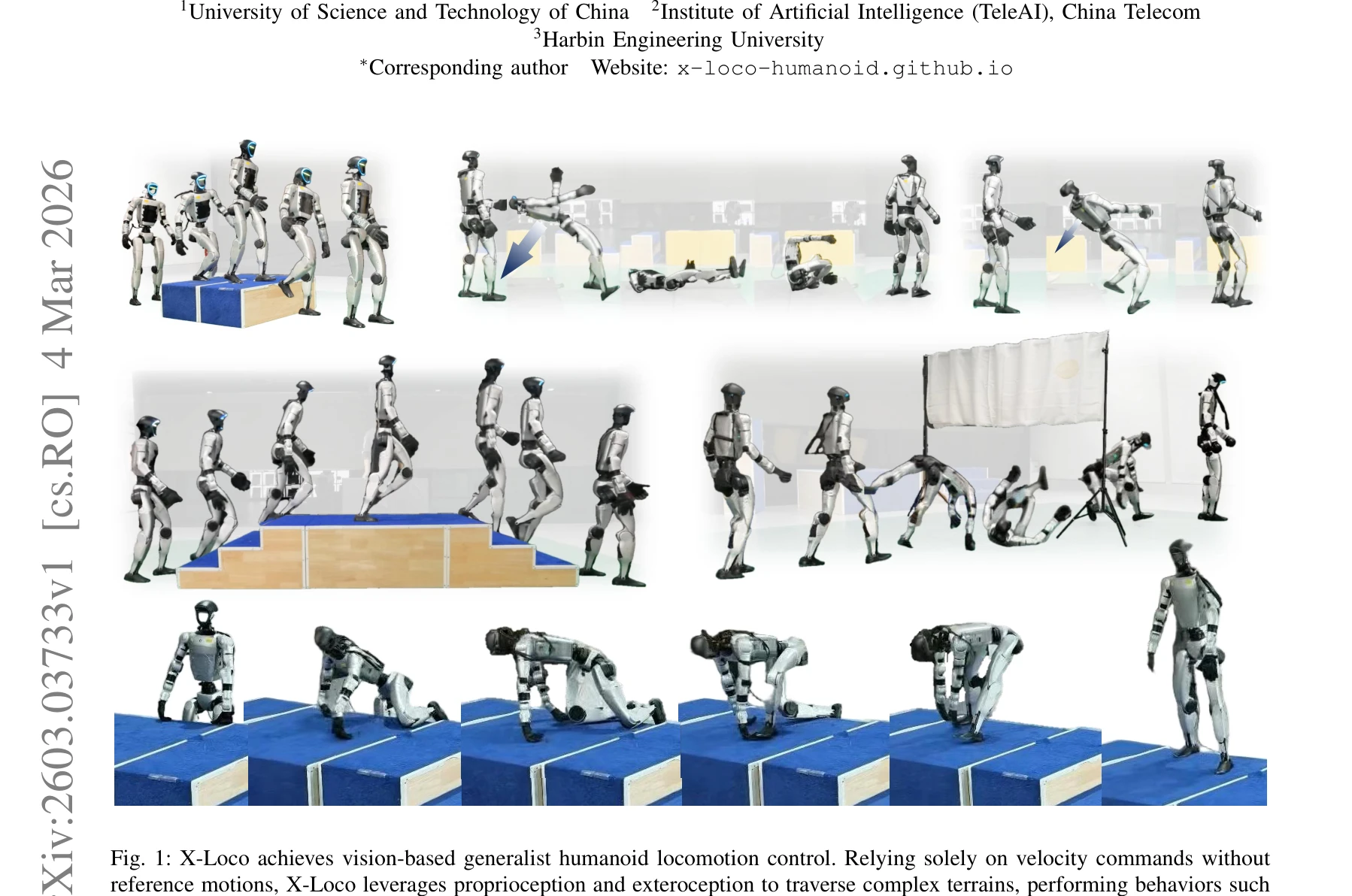
X-Loco는 시너지 정책 증류를 통해 세 개의 전문가 정책(upright locomotion, fall recovery, whole-body coordination)을 단일 비전 기반 범용 정책으로 통합하여, 속도 명령만으로 다양한 휴머노이드 보행 스킬을 수행하는 프레임워크이다.