Essence
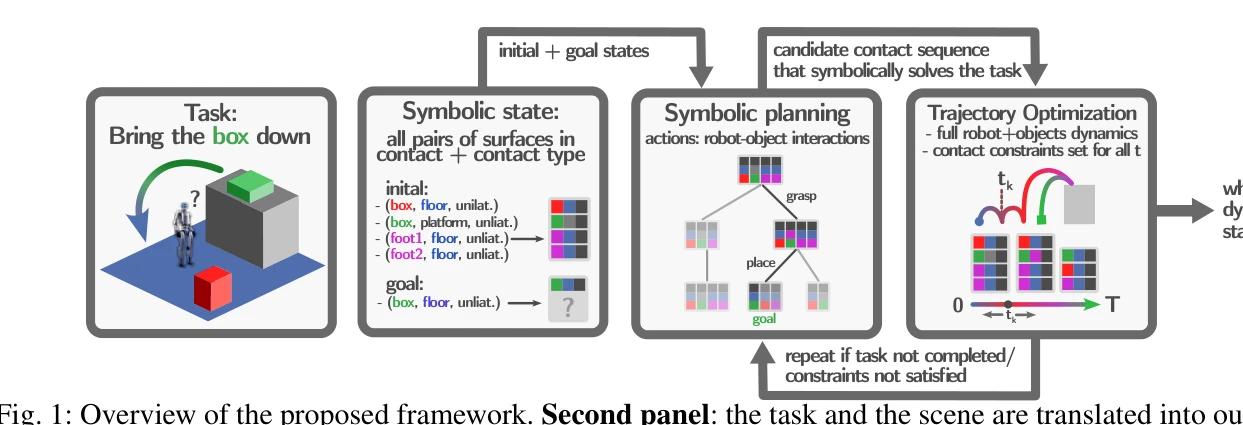
Fig. 1: Overview of the proposed framework. Second panel: the task and the scene are translated into our symbolic framew
본 논문은 접촉 모드의 통일된 표현을 통해 로봇 이동과 조작을 함께 계획하는 최적화 기반 TAMP 프레임워크를 제시하며, 인형로봇의 장시간 복잡한 로코-조작 행동 생성을 가능하게 한다.
저자: Michal Ciebielski, Victor Dhédin, Majid Khadiv | 날짜: 2025-08-16 | DOI: 10.48550/arXiv.2508.14099 📄 PDF
Fig. 1: Overview of the proposed framework. Second panel: the task and the scene are translated into our symbolic framew
본 논문은 접촉 모드의 통일된 표현을 통해 로봇 이동과 조작을 함께 계획하는 최적화 기반 TAMP 프레임워크를 제시하며, 인형로봇의 장시간 복잡한 로코-조작 행동 생성을 가능하게 한다.
Fig. 1: Overview of the proposed framework. Second panel: the task and the scene are translated into our symbolic framew
총평: 본 논문은 인형로봇의 동적 로코-조작 계획이라는 도전적 문제에 대해 접촉 수준의 통일된 기호 표현을 통해 이론적으로 견고한 TAMP 솔루션을 제시하며, 전신 동역학과 구동 제약을 포함한 점에서 학술적 기여도가 높다. 다만 실제 로봇 실험 검증과 대규모 문제에 대한 계산 효율 평가가 추가되면 영향력을 더욱 높일 수 있을 것으로 판단된다.