Essence
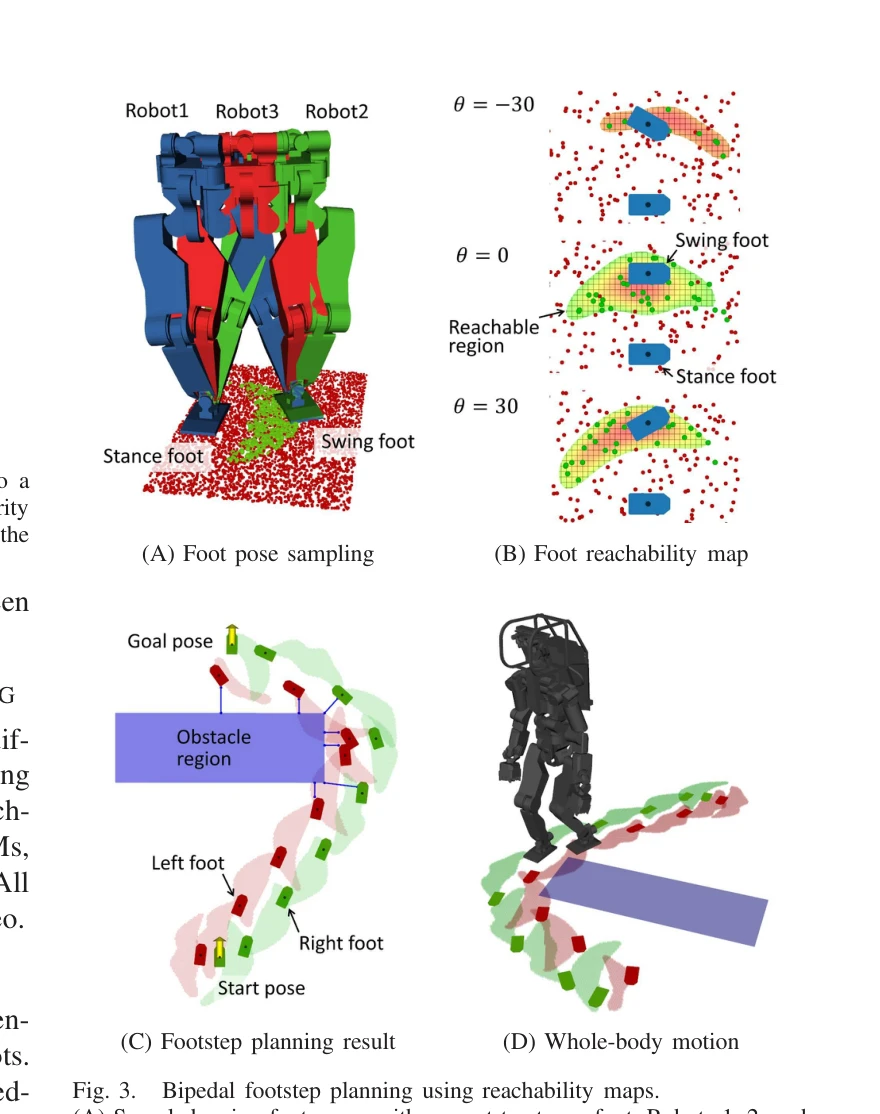
Fig. 1.
본 논문은 humanoid robot의 motion generation을 위해 differentiable reachability map을 학습하는 새로운 방법을 제안한다. 이 맵은 task space에서 정의된 스칼라 함수로서, robot end-effector이 도달 가능한 영역에서만 양수값을 가지며, task space 좌표에 대해 미분가능하여 continuous optimization의 제약조건으로 직접 사용될 수 있다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 humanoid motion planning의 computational bottleneck을 해결하기 위해 differentiable reachability map이라는 혁신적 표현을 제안하며, binary classification 기반의 학습 방법론은 기존 방식의 한계를 잘 극복한다. 다만 실제 실험 결과와 성능 평가에 대한 상세한 검증이 필요하다.