저자: Lujie Yang, Xiaoyu Huang, Zhen Wu, Angjoo Kanazawa, Pieter Abbeel, Carmelo Sferrazza, C. Karen Liu, Rocky Duan, Guanya Shi | 날짜: 2025-10-08 | DOI: 10.48550/arXiv.2509.26633 📄 PDF
Essence
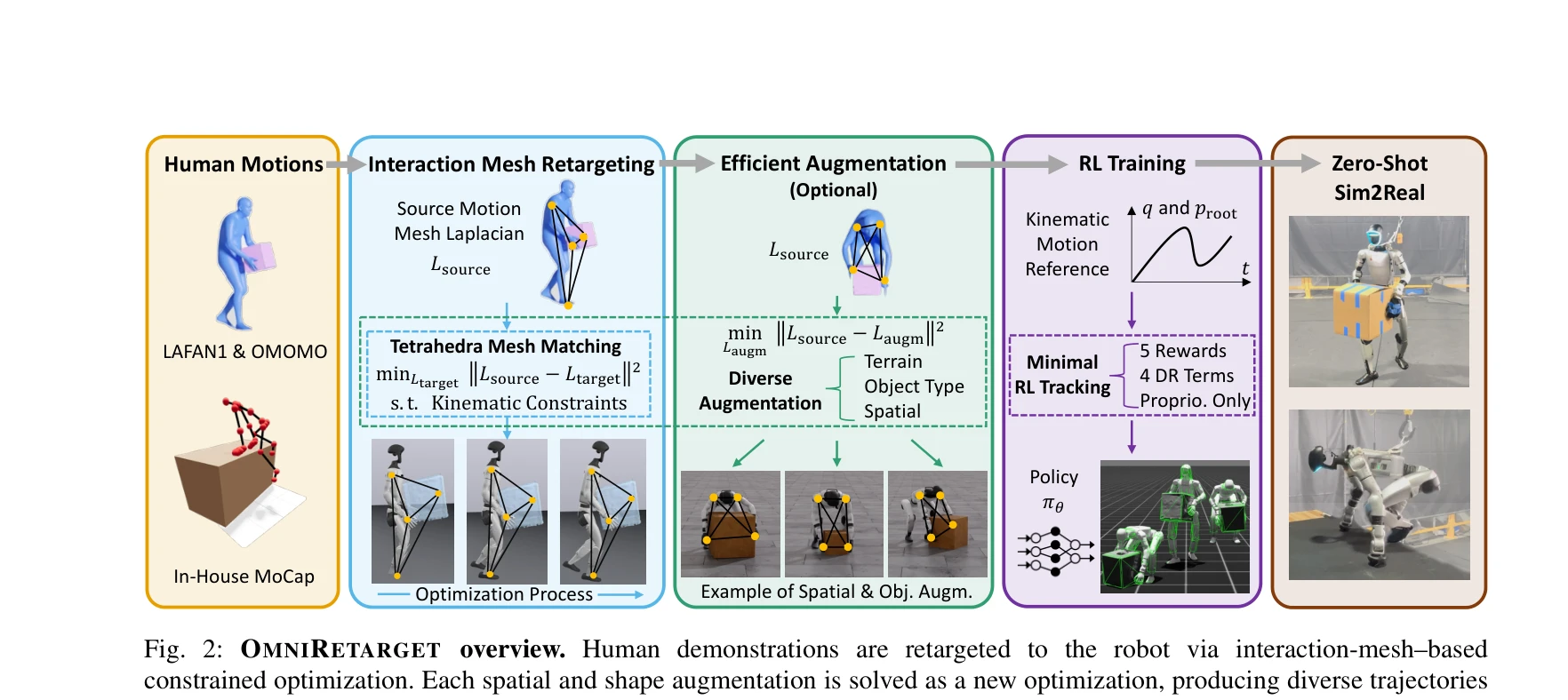
Fig. 2: OMNIRETARGET overview. Human demonstrations are retargeted to the robot via interaction-mesh–based
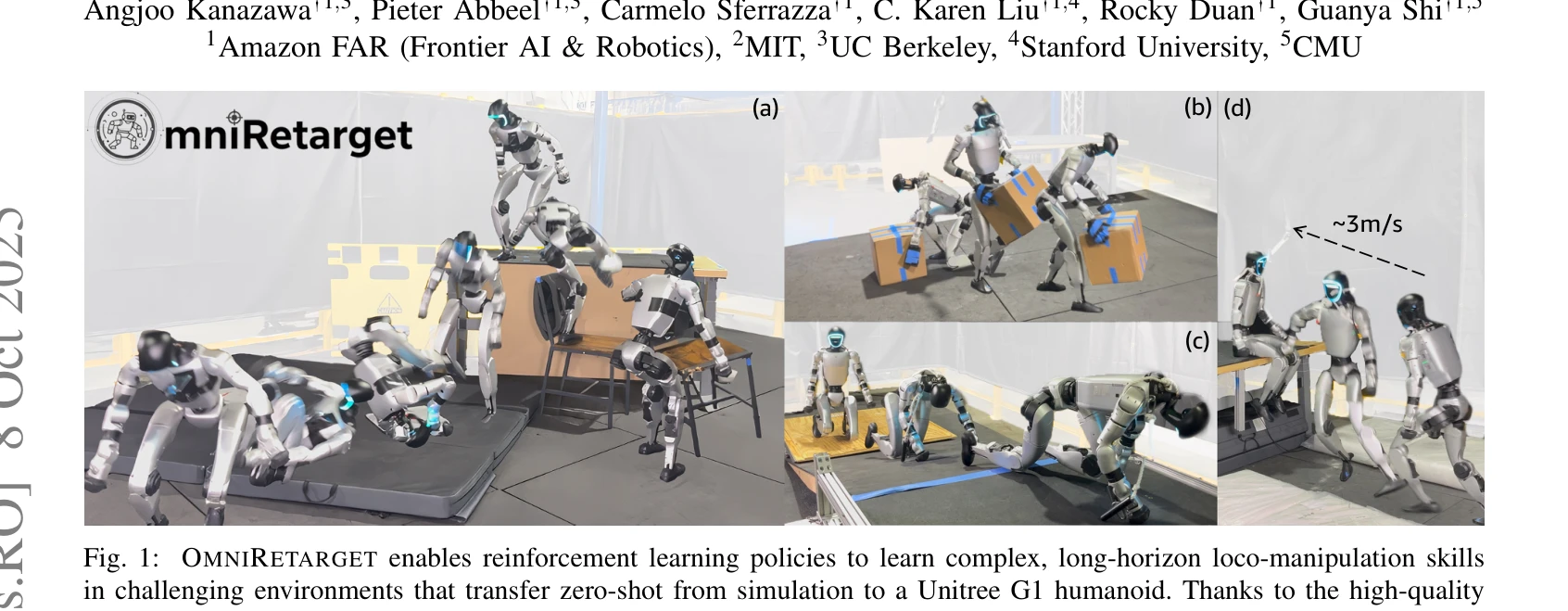
OmniRetarget은 interaction mesh 기반의 제약 최적화를 통해 human motion을 humanoid robot을 위한 고품질 kinematic reference로 retarget하며, 상호작용을 보존하면서 단일 시연으로부터 다양한 로봇 구체화, 지형, 물체 설정으로 효율적인 data augmentation을 수행한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: OmniRetarget은 interaction-preserving motion retargeting과 체계적 data augmentation을 통해 humanoid robot 제어의 데이터 병목을 해결하는 실질적이고 영향력 있는 기여이며, 최소한의 reward engineering으로 complex whole-body loco-manipulation 기술의 zero-shot sim-to-real transfer를 성공적으로 입증하여 로보틱스 커뮤니티에 매우 유용한 공개 도구 및 데이터셋을 제공한다.