Essence
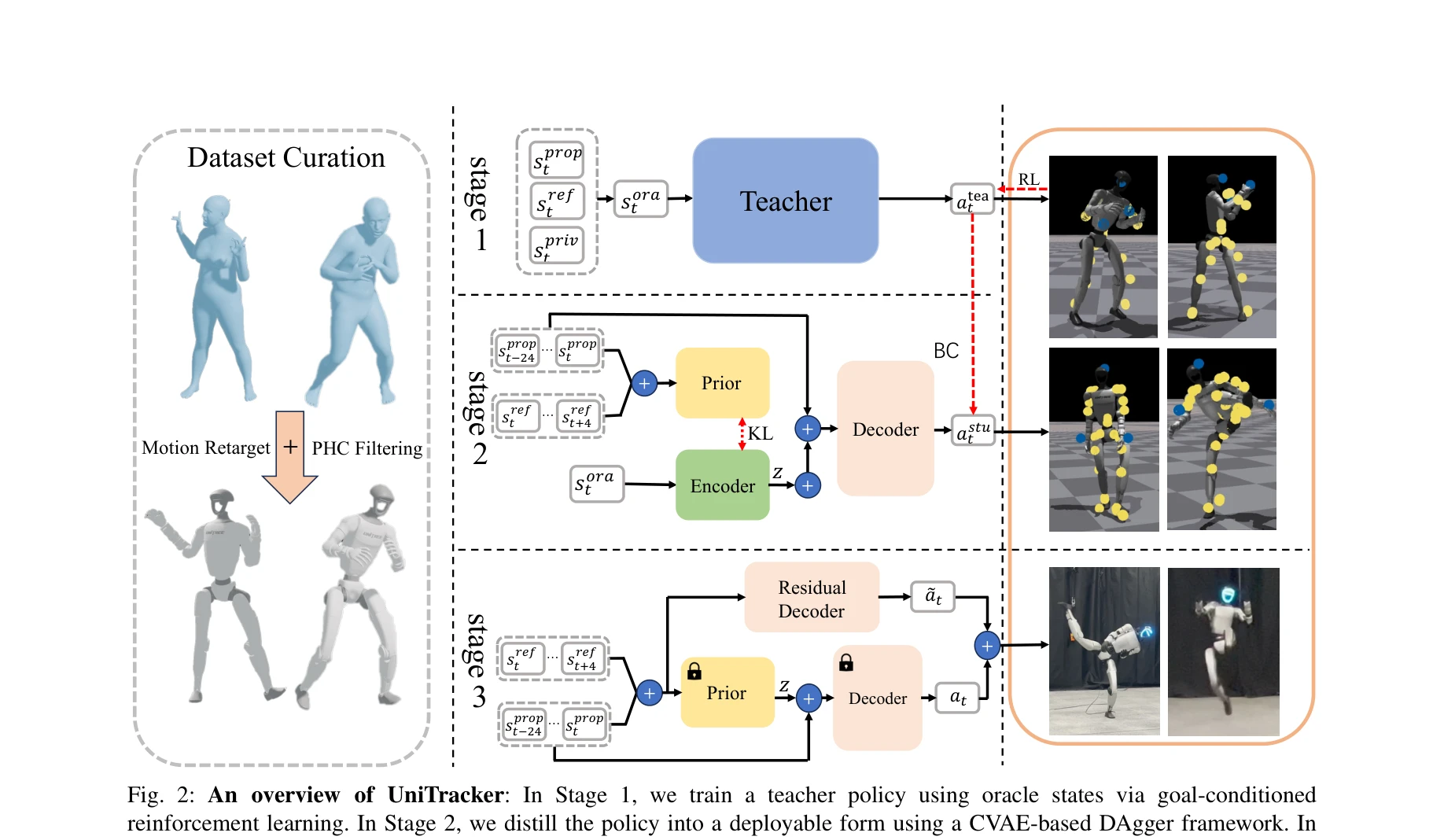
Fig. 2: An overview of UniTracker: In Stage 1, we train a teacher policy using oracle states via goal-conditioned
UniTracker는 CVAE 기반 세 단계 학습 프레임워크를 통해 부분 관측 조건에서도 다양하고 일관성 있는 전신 동작 추적을 실현하는 휴머노이드 로봇 제어 정책이다.
저자: Kangning Yin, Weishuai Zeng, Ke Fan, Minyue Dai, Zirui Wang, Qiang Zhang, Zheng Tian, Jingbo Wang, Jiangmiao Pang, Weinan Zhang | 날짜: 2025-07-10 | URL: https://arxiv.org/abs/2507.07356 📄 PDF
Fig. 2: An overview of UniTracker: In Stage 1, we train a teacher policy using oracle states via goal-conditioned
UniTracker는 CVAE 기반 세 단계 학습 프레임워크를 통해 부분 관측 조건에서도 다양하고 일관성 있는 전신 동작 추적을 실현하는 휴머노이드 로봇 제어 정책이다.
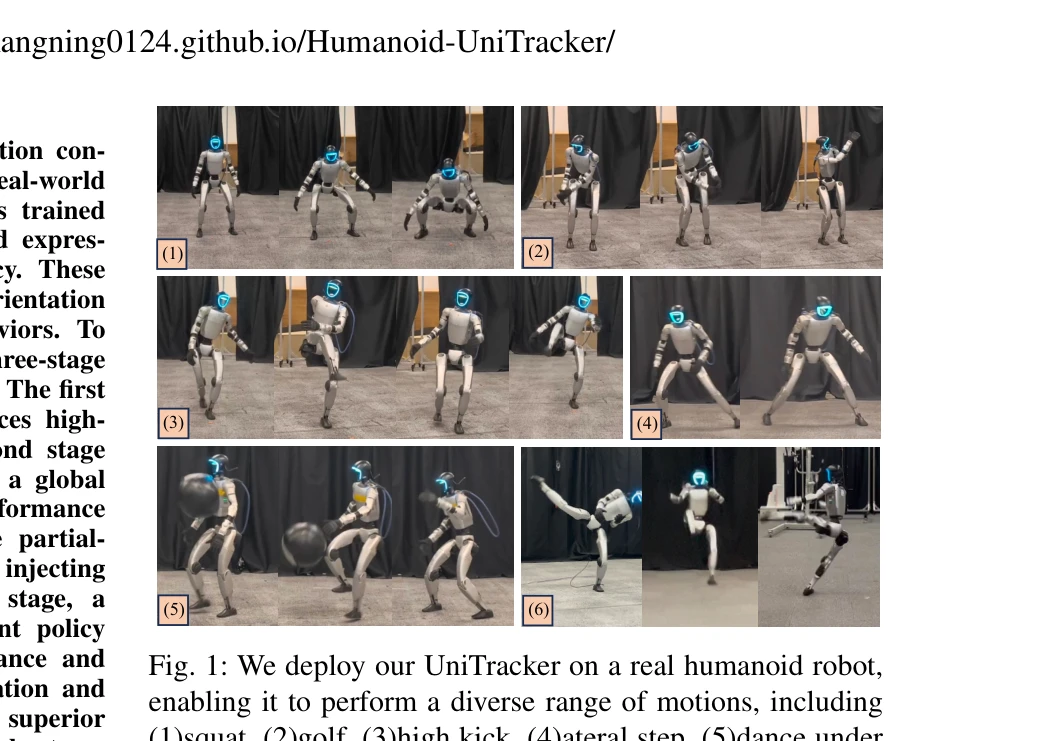
Fig. 1: We deploy our UniTracker on a real humanoid robot,
Fig. 2: An overview of UniTracker: In Stage 1, we train a teacher policy using oracle states via goal-conditioned
총평: UniTracker는 CVAE 기반 증류와 전역 맥락 정렬을 통해 기존 teacher-student 프레임워크의 핵심 한계를 우아하게 해결하며, 실제 로봇에서 8,000개 이상의 동작 추적을 성공시킨 강력한 기여이다. 방법론의 창의성, 실제 배포 검증, 그리고 실용적 영향 면에서 높은 평가를 받을 만한 논문이다.