Essence
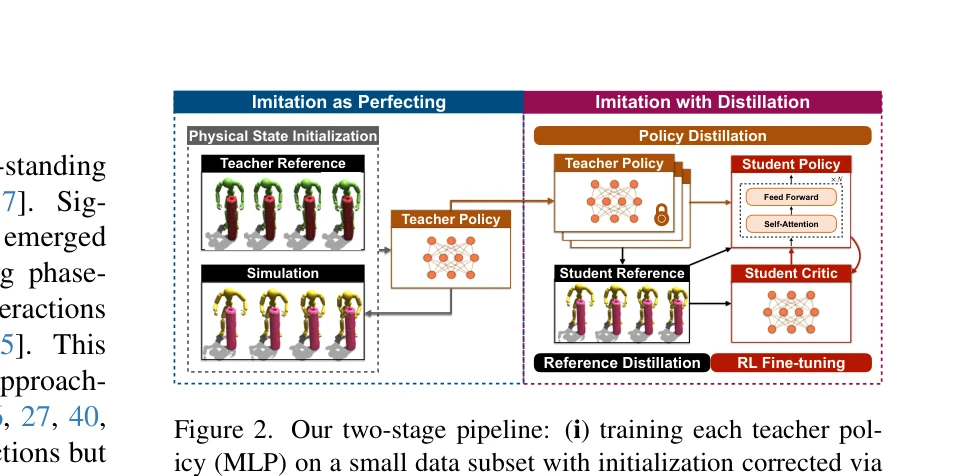
Figure 2. Our two-stage pipeline: (i) training each teacher pol-
InterMimic은 교사-학생 증류 및 RL 미세조정을 통해 불완전한 MoCap 데이터로부터 다양한 동적 객체와의 전신 상호작용을 학습할 수 있는 물리 기반 제어 정책 프레임워크이다.
저자: Sirui Xu, Hung Yu Ling, Yu-Xiong Wang, Liang-Yan Gui | 날짜: 2025-02-27 | URL: https://arxiv.org/abs/2502.20390 📄 PDF
Figure 2. Our two-stage pipeline: (i) training each teacher pol-
InterMimic은 교사-학생 증류 및 RL 미세조정을 통해 불완전한 MoCap 데이터로부터 다양한 동적 객체와의 전신 상호작용을 학습할 수 있는 물리 기반 제어 정책 프레임워크이다.
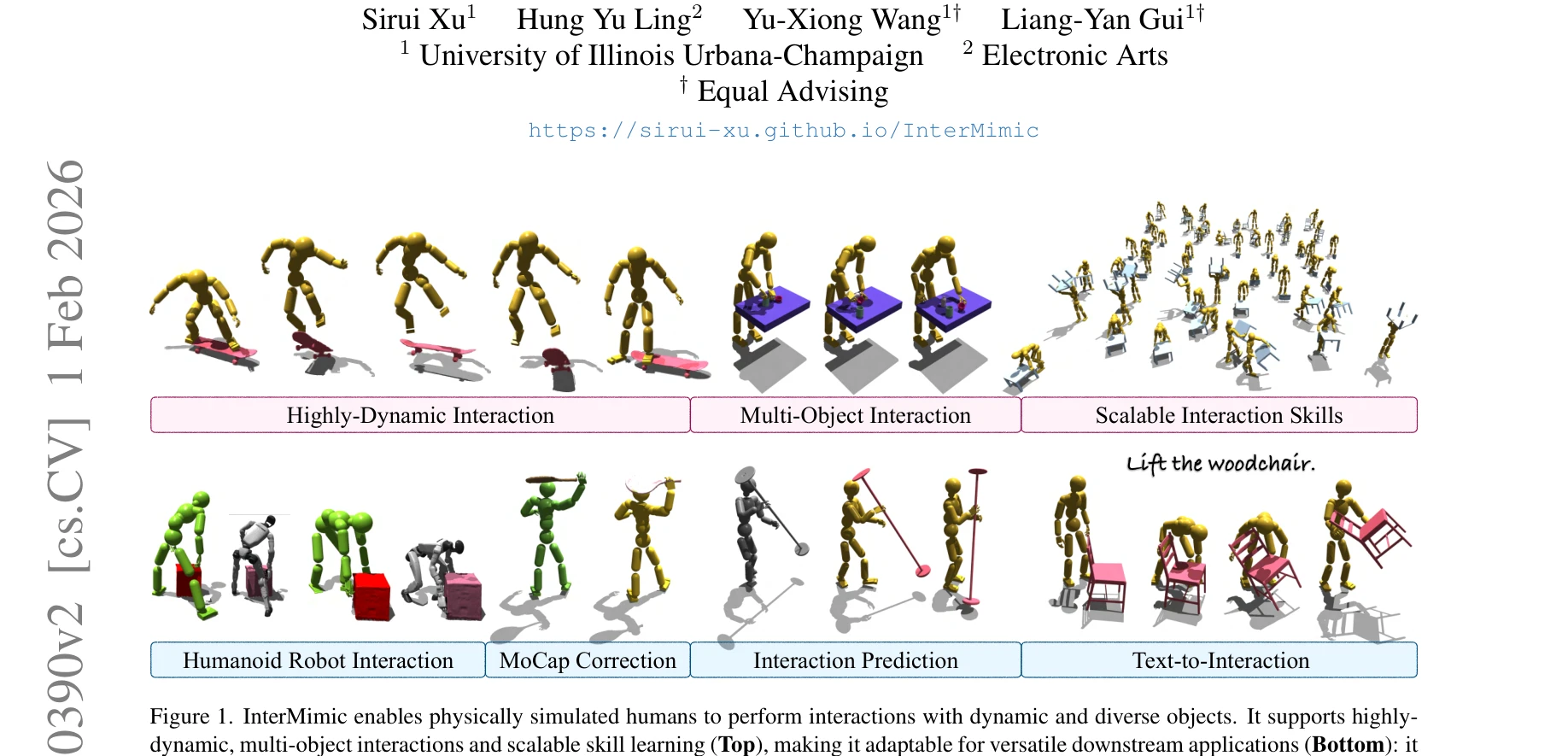
Figure 1. InterMimic enables physically simulated humans to perform interactions with dynamic and diverse objects. It su
Figure 2. Our two-stage pipeline: (i) training each teacher pol-
총평: InterMimic은 불완전한 대규모 MoCap 데이터로부터 다양한 동적 객체와의 전신 상호작용을 학습하는 첫 통합 프레임워크로, 교사-학생 증류와 RL 미세조정의 창의적 결합을 통해 물리 기반 상호작용 애니메이션의 새로운 기준을 제시한다.