Essence
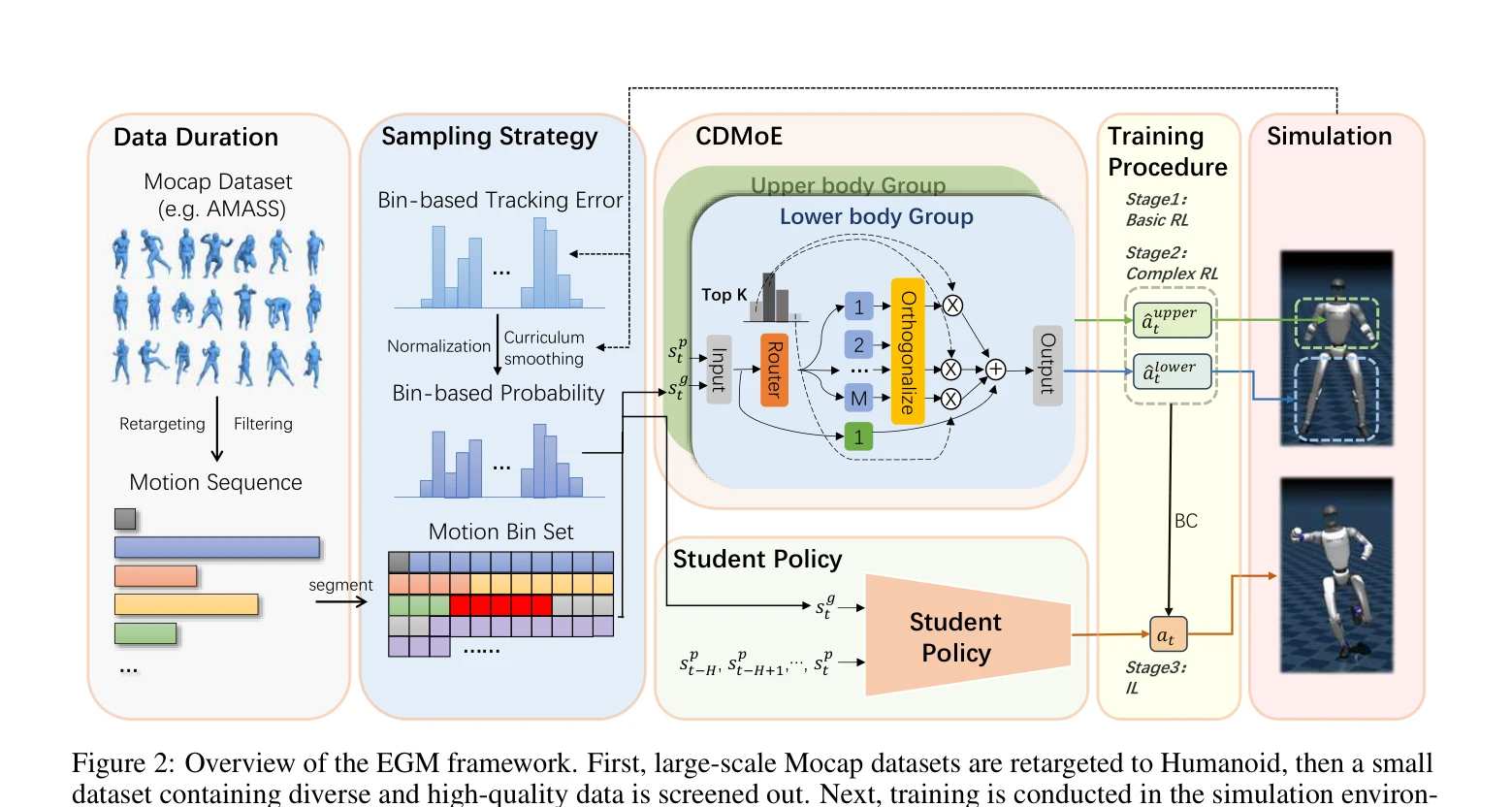
Figure 2: Overview of the EGM framework. First, large-scale Mocap datasets are retargeted to Humanoid, then a small
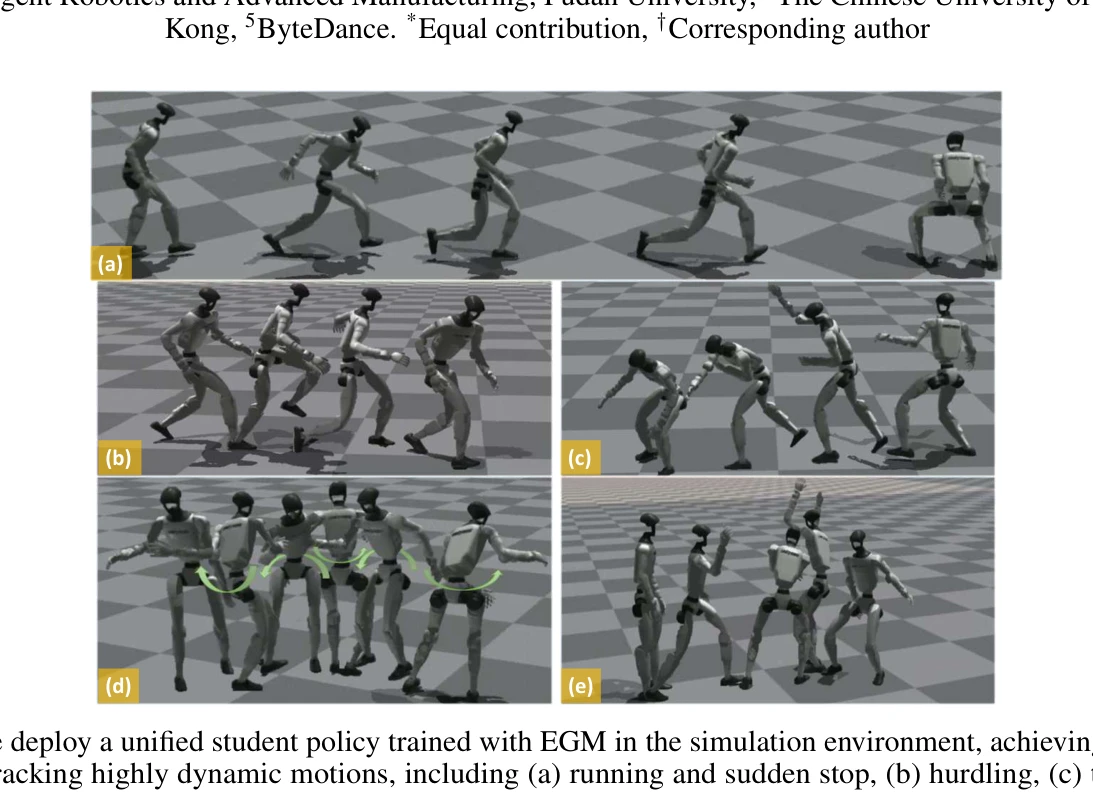
EGM은 Bin-based Cross-motion Curriculum Adaptive Sampling과 Composite Decoupled Mixture-of-Experts 아키텍처를 통해 4.08시간의 소량 데이터로 49.25시간의 다양한 모션을 효율적으로 추적하는 일반화된 휴머노이드 제어 정책을 학습한다.