Essence

Fig. 1: Overview. VB-Com enables humanoid robots (move direction in orange arrorw) to traverse dynamic terrains and obst
VB-Com은 휴머노이드 로봇이 시각 정보의 결손에 대응하기 위해 시각 기반 정책과 고유감각 기반의 맹목 정책을 동적으로 전환하는 복합 제어 프레임워크를 제안한다.
저자: Junli Ren, Tao Huang, Huayi Wang, Zirui Wang, Qingwei Ben, Junfeng Long, Yanchao Yang, Jiangmiao Pang, Ping Luo | 날짜: 2025-02-20 | URL: https://arxiv.org/abs/2502.14814 📄 PDF
Fig. 1: Overview. VB-Com enables humanoid robots (move direction in orange arrorw) to traverse dynamic terrains and obst
VB-Com은 휴머노이드 로봇이 시각 정보의 결손에 대응하기 위해 시각 기반 정책과 고유감각 기반의 맹목 정책을 동적으로 전환하는 복합 제어 프레임워크를 제안한다.
Fig. 1: Overview. VB-Com enables humanoid robots (move direction in orange arrorw) to traverse dynamic terrains and obst
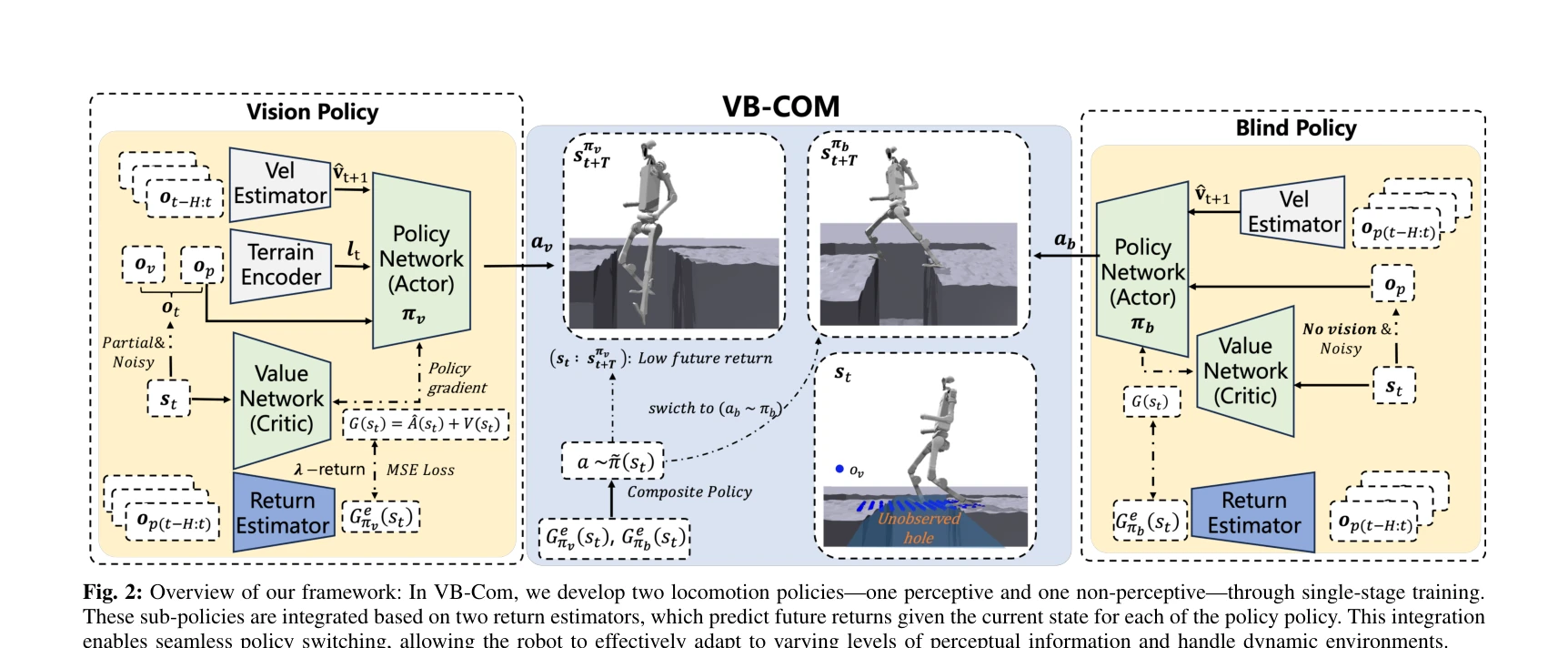
Fig. 2: Overview of our framework: In VB-Com, we develop two locomotion policies—one perceptive and one non-perceptive—t
총평: VB-Com은 휴머노이드 로봇의 지각 견고성 문제를 정책 합성으로 우아하게 해결하며, return estimator 기반 동적 선택 메커니즘은 창의적이고 실용적이다. 동적 지형 및 지각 노이즈 시나리오의 체계적 구성과 두 휴머노이드 플랫폼에서의 검증이 강점이나, 실제 배포 결과 확장과 일반화 능력 분석이 보강되면 더욱 설득력 있을 것이다.