저자: Yidan Lu, Rurui Yang, Qiran Kou, Mengting Chen, Tao Fan, Peter Cui, Yinzhao Dong, Peng Lu | 날짜: 2025-09-16 | URL: https://arxiv.org/abs/2509.12858 📄 PDF
Essence
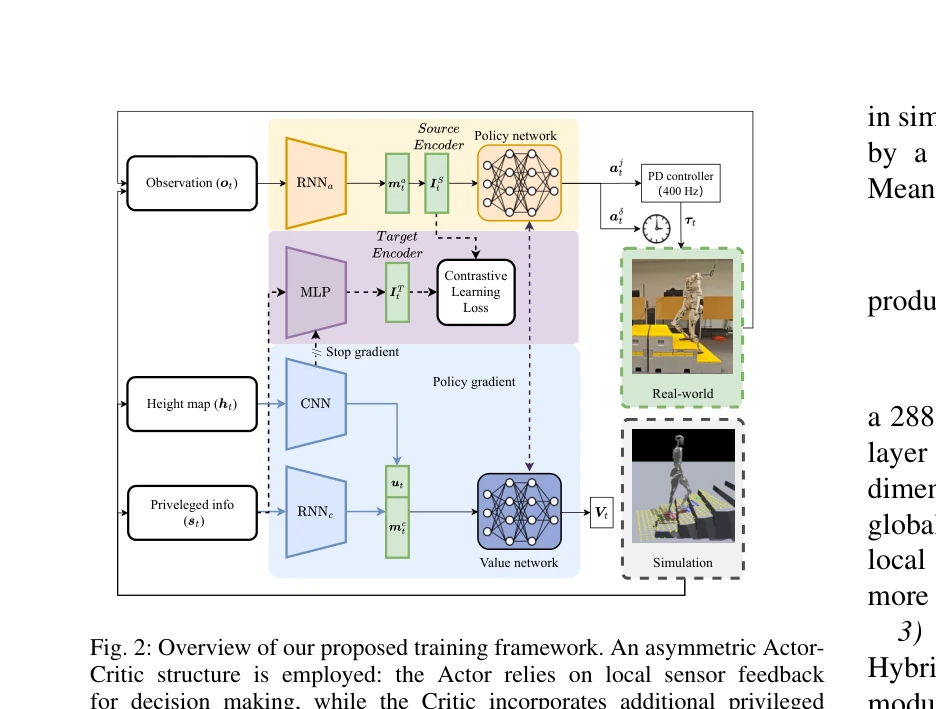
Fig. 2: Overview of our proposed training framework. An asymmetric Actor-
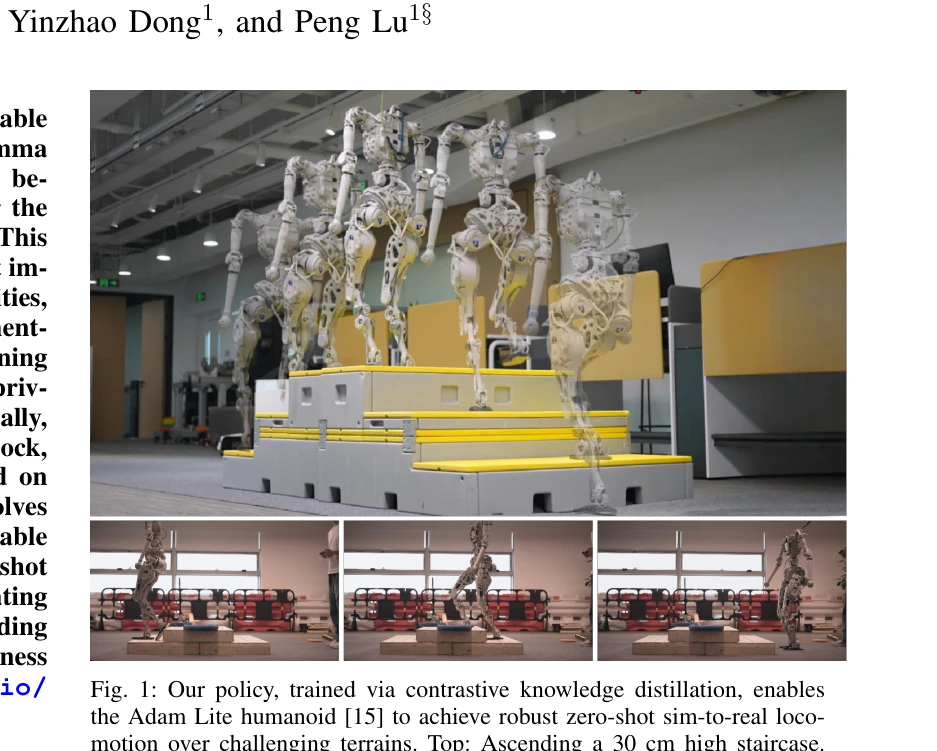
Contrastive learning을 이용해 시뮬레이션의 특권 정보(terrain heightmap)를 순수 proprioceptive policy에 증류시켜 지각의 선견성을 얻으면서도 배포 시 지각 센서의 비용을 피한다. Adaptive gait clock을 통해 고정된 클럭 보행과 불안정한 자유 클럭 보행 사이의 근본적 trade-off를 해결한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 이 논문은 contrastive learning을 통해 시뮬레이션 특권 정보를 proprioceptive policy에 효과적으로 증류하여 지각 센서 없이도 선견성 있는 제어를 달성하는 창의적 해결책을 제시한다. Zero-shot sim-to-real 전이로 극도로 도전적인 지형에서의 강건한 보행을 실증함으로써 인간형 로봇 실용화의 중요한 진전을 보여준다.