Essence
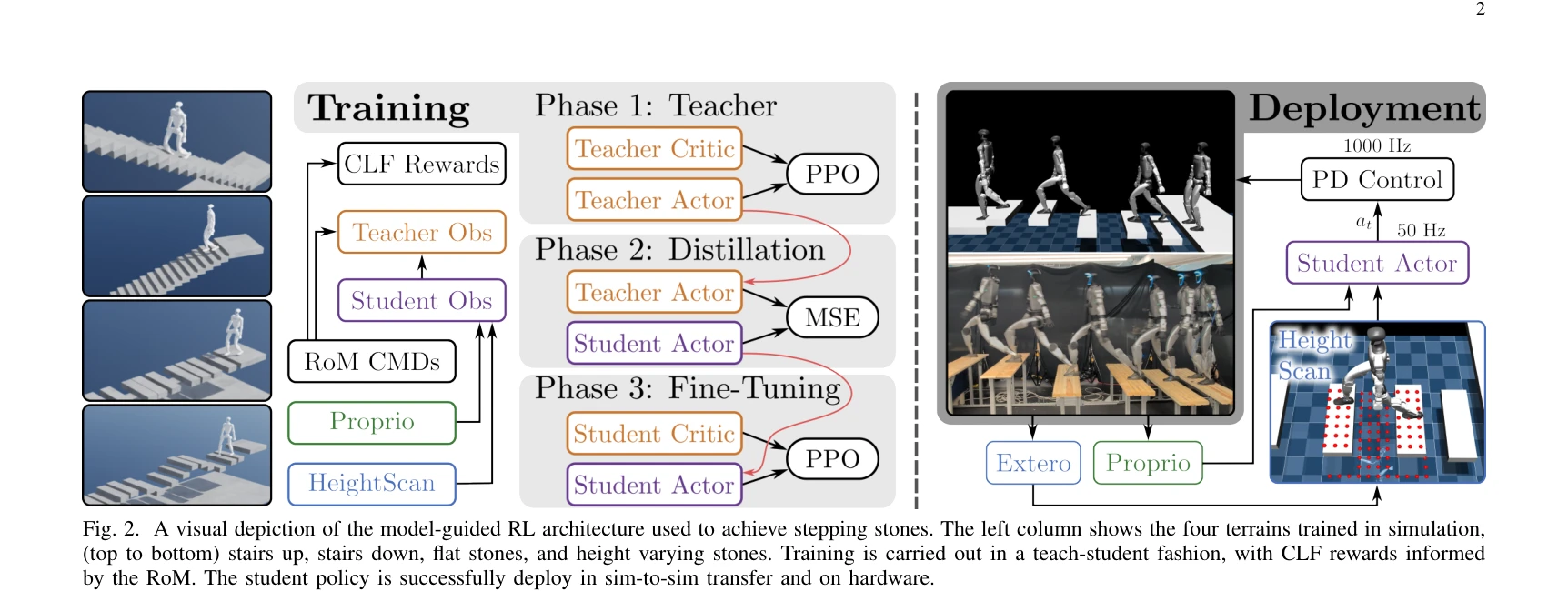
Fig. 2. A visual depiction of the model-guided RL architecture used to achieve stepping stones. The left column shows th
이 논문은 감소된 차수의 발판 계획기와 Control Lyapunov Function (CLF) 기반 보상을 통해 물리학 기반 구조로 강화학습을 안내하여, 제한된 발판에서 인간형 로봇의 정밀한 보행을 달성한다.
저자: Min Dai, William D. Compton, Junheng Li, Lizhi Yang, Aaron D. Ames | 날짜: 2026-01-09 | URL: https://arxiv.org/abs/2601.06286 📄 PDF
Fig. 2. A visual depiction of the model-guided RL architecture used to achieve stepping stones. The left column shows th
이 논문은 감소된 차수의 발판 계획기와 Control Lyapunov Function (CLF) 기반 보상을 통해 물리학 기반 구조로 강화학습을 안내하여, 제한된 발판에서 인간형 로봇의 정밀한 보행을 달성한다.
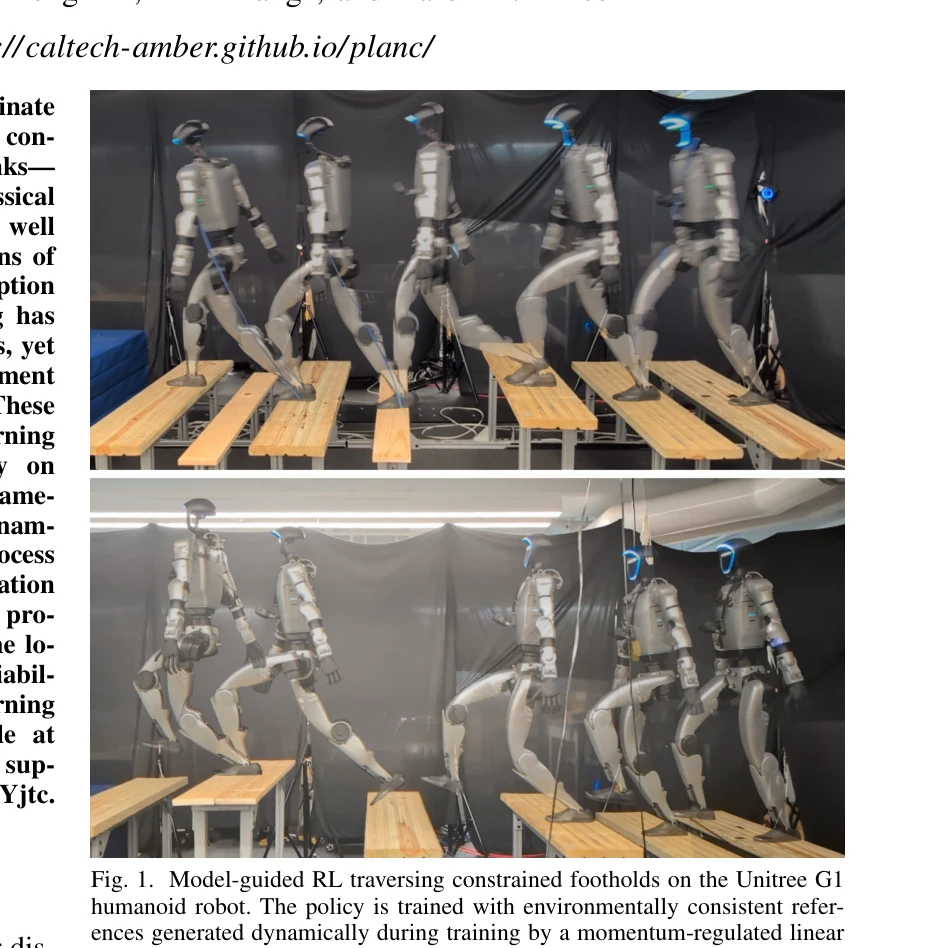
Fig. 1. Model-guided RL traversing constrained footholds on the Unitree G1
Fig. 2. A visual depiction of the model-guided RL architecture used to achieve stepping stones. The left column shows th
총평: 본 논문은 물리 기반 구조와 강화학습을 효과적으로 결합하여 stepping-stone 보행의 정밀성과 강건성 문제를 우아하게 해결하였으며, 하드웨어 검증과 오픈소스 공개를 통해 높은 실용적 가치를 제공한다.