Essence
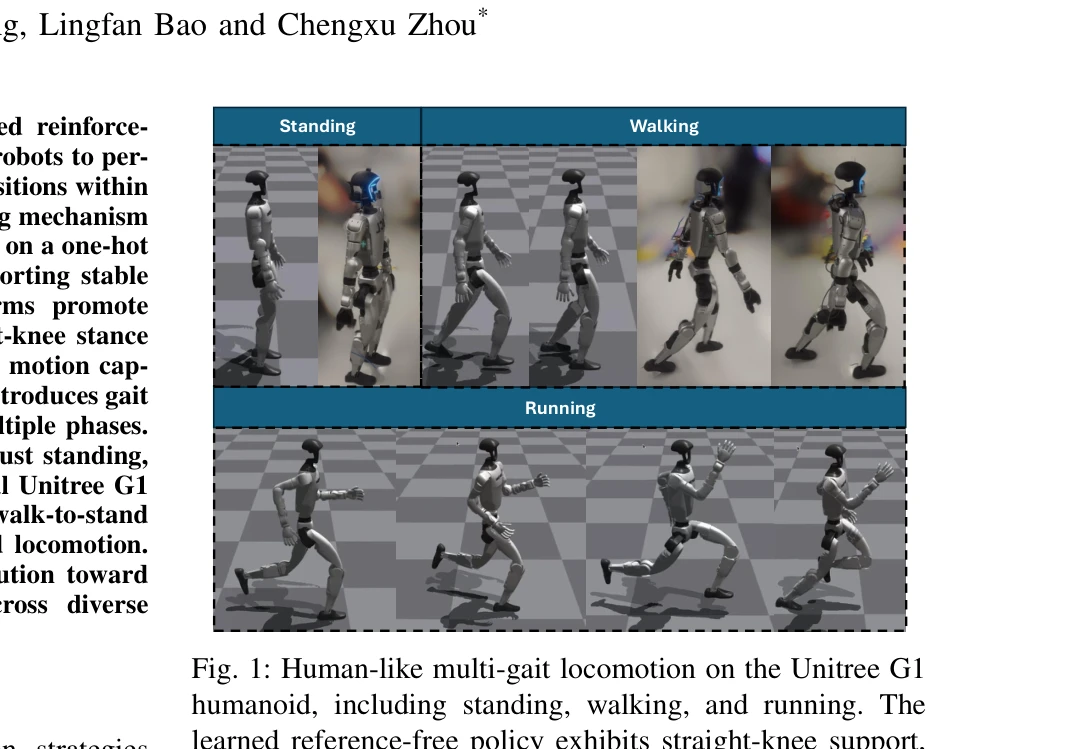
Fig. 1: Human-like multi-gait locomotion on the Unitree G1
인간에게서 영감을 얻은 보상 형성과 gait-conditioned reward routing을 통해 단일 recurrent policy에서 서서기, 걷기, 달리기 및 전환을 학습하는 통합 reference-free RL 프레임워크를 제시한다.
저자: Tianhu Peng, Lingfan Bao, Chengxu Zhou | 날짜: 2025-05-27 | URL: https://arxiv.org/abs/2505.20619 📄 PDF
Fig. 1: Human-like multi-gait locomotion on the Unitree G1
인간에게서 영감을 얻은 보상 형성과 gait-conditioned reward routing을 통해 단일 recurrent policy에서 서서기, 걷기, 달리기 및 전환을 학습하는 통합 reference-free RL 프레임워크를 제시한다.
Fig. 1: Human-like multi-gait locomotion on the Unitree G1
총평: 이 논문은 gait-conditioned reward routing과 생물역학 기반 보상 설계를 통해 MoCap 없이 자연스러운 다중 gait 학습을 가능하게 하는 우아한 프레임워크를 제시하며, 실제 인간형 로봇에서의 검증으로 실용성을 입증한다.