Essence
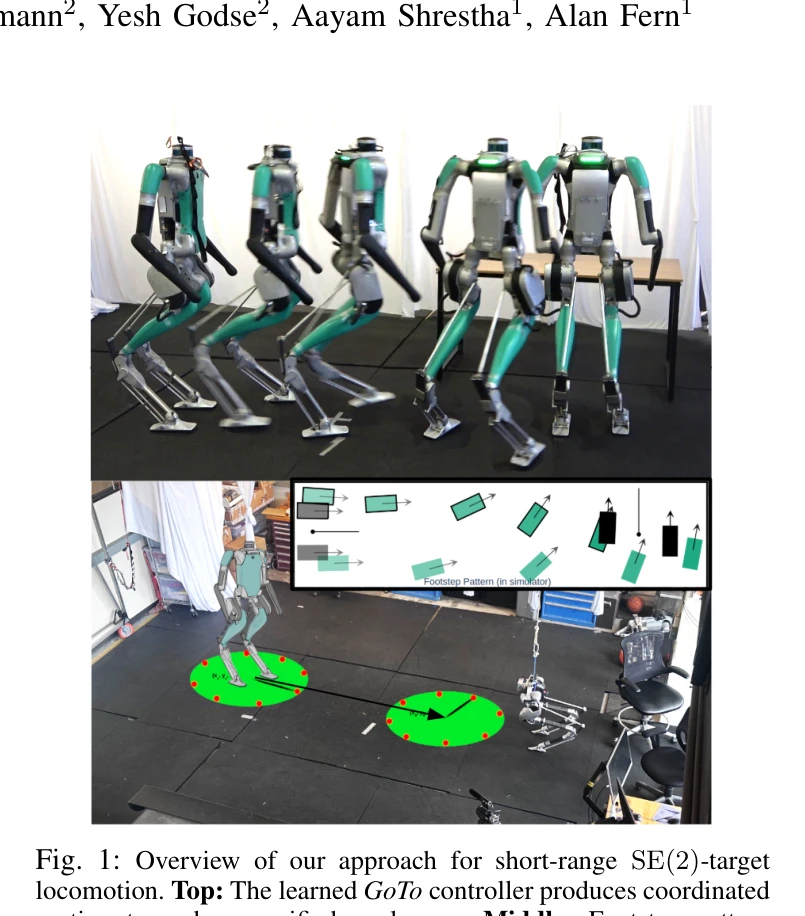
Fig. 1: Overview of our approach for short-range SE(2)-target
본 논문은 휴머노이드 로봇의 단거리 SE(2) 목표 위치 도달을 위해 constellation 기반 보상 함수를 활용한 강화학습 접근법을 제시하며, 속도 추적 기반의 기존 방법들이 생성하는 비효율적인 행진 동작을 제거한다.
저자: Pranay Dugar, Mohitvishnu S. Gadde, Jonah Siekmann, Yesh Godse, Aayam Shrestha, Alan Fern | 날짜: 2025-08-16 | URL: https://arxiv.org/abs/2508.14098 📄 PDF
Fig. 1: Overview of our approach for short-range SE(2)-target
본 논문은 휴머노이드 로봇의 단거리 SE(2) 목표 위치 도달을 위해 constellation 기반 보상 함수를 활용한 강화학습 접근법을 제시하며, 속도 추적 기반의 기존 방법들이 생성하는 비효율적인 행진 동작을 제거한다.
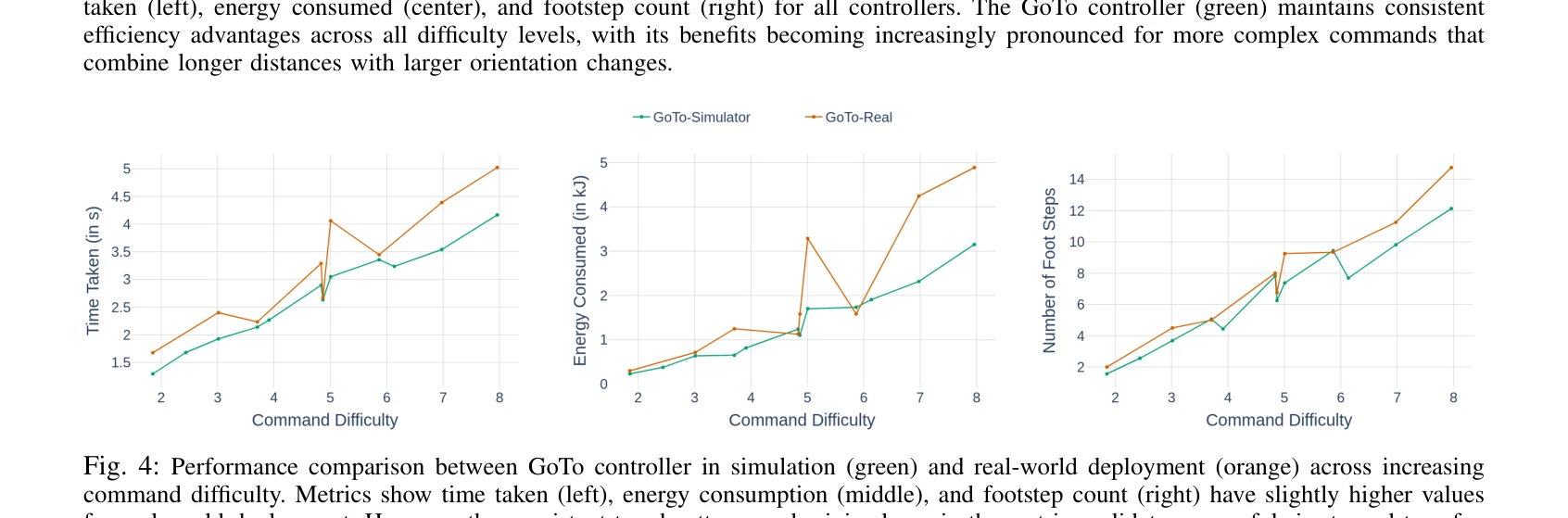
Fig. 4: Performance comparison between GoTo controller in simulation (green) and real-world deployment (orange) across i
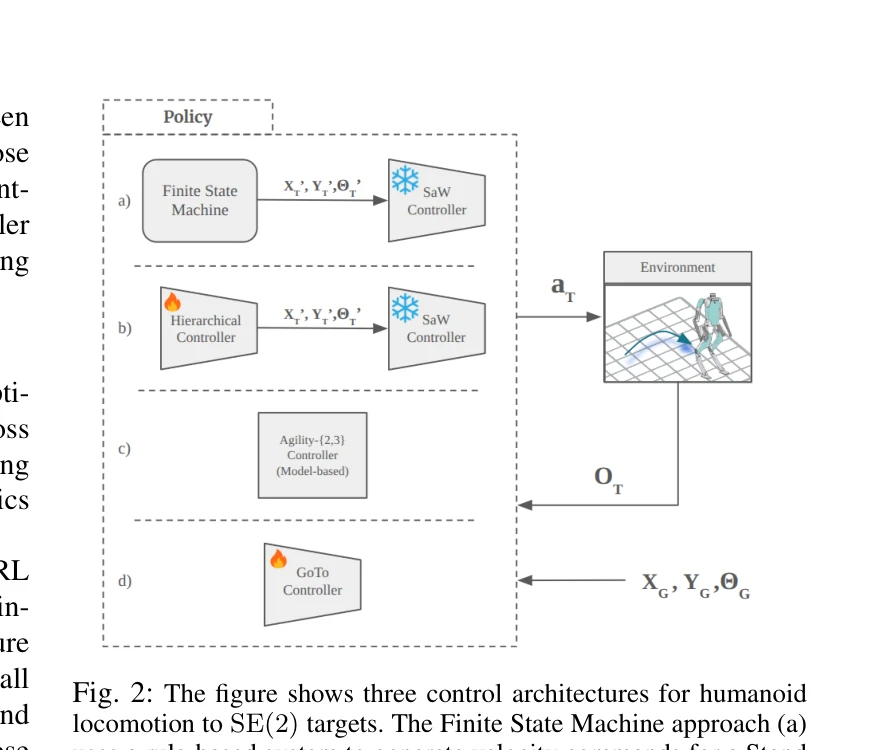
Fig. 2: The figure shows three control architectures for humanoid
총평: 이 논문은 단거리 SE(2) 목표 도달이라는 실제 작업에 특화된 새로운 보상 함수와 RL 접근법을 제시하며, 직관적인 설계와 sim-to-real 전이 성공으로 휴머노이드 로봇의 실무 적용 가능성을 크게 향상시킨다.