Essence
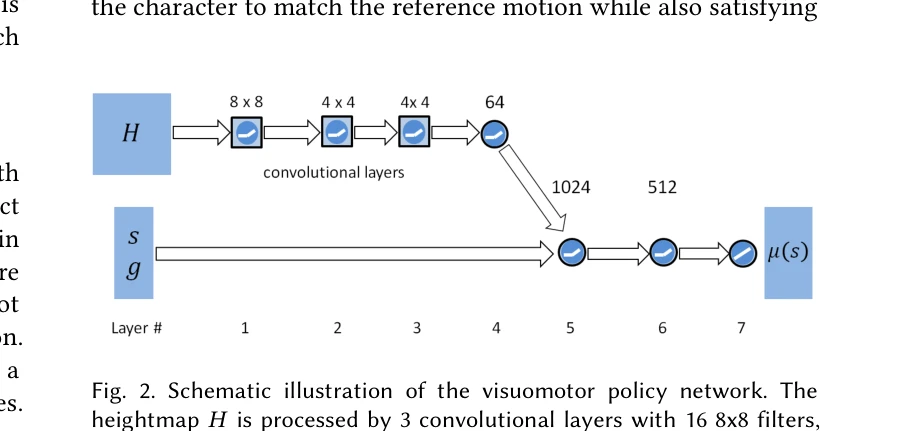
Fig. 1. Highly dynamic skills learned by imitating reference motion capture clips using our method, executed by physical
Motion capture 데이터를 활용한 example-guided reinforcement learning으로 물리 기반 캐릭터 애니메이션을 학습하는 방법을 제안하며, 모션 모방과 task 목표를 결합하여 강건하고 다양한 기술을 수행하는 제어 정책을 학습한다.