Essence
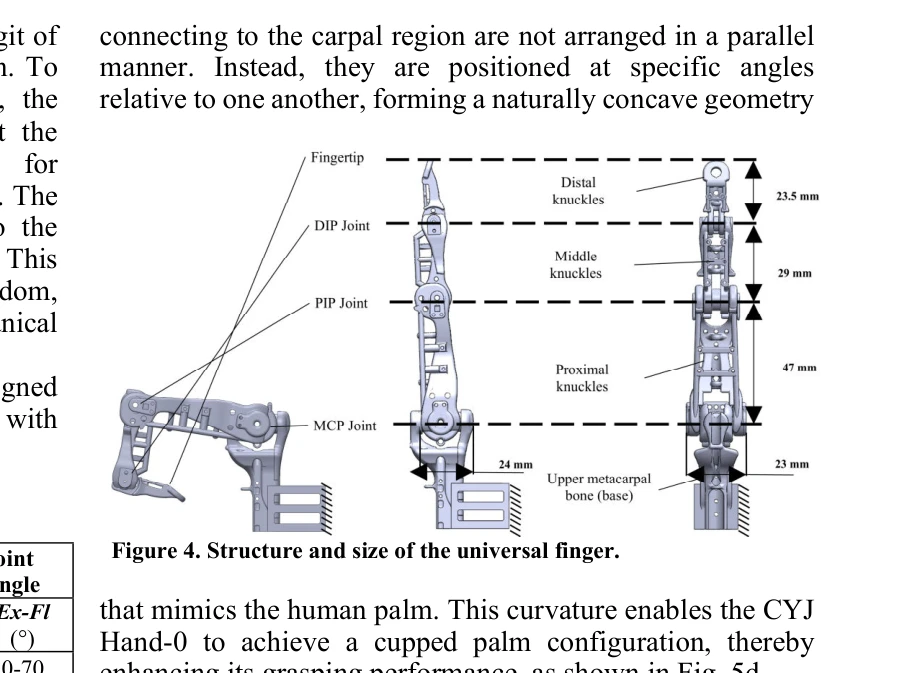
Figure 3. (a) The overall structural design of the bionic dexterous hand. (b) Components of the bionic dexterous hand. (
CYJ Hand-0는 SMA와 DC 모터의 하이브리드 구동 방식을 결합한 21-DOF 휴머노이드 손으로, 3D 프린팅 AlSi10Mg 금속 프레임과 고강도 낚싯줄 텐던을 활용하여 인간의 손 구조를 생체모방한다.
저자: Jin Chai, Xiang Yao, Mengfan Hou, Yanghong Li, Erbao Dong | 날짜: 2025-07-19 | URL: https://arxiv.org/abs/2507.14538 📄 PDF
Figure 3. (a) The overall structural design of the bionic dexterous hand. (b) Components of the bionic dexterous hand. (
CYJ Hand-0는 SMA와 DC 모터의 하이브리드 구동 방식을 결합한 21-DOF 휴머노이드 손으로, 3D 프린팅 AlSi10Mg 금속 프레임과 고강도 낚싯줄 텐던을 활용하여 인간의 손 구조를 생체모방한다.
Figure 3. (a) The overall structural design of the bionic dexterous hand. (b) Components of the bionic dexterous hand. (
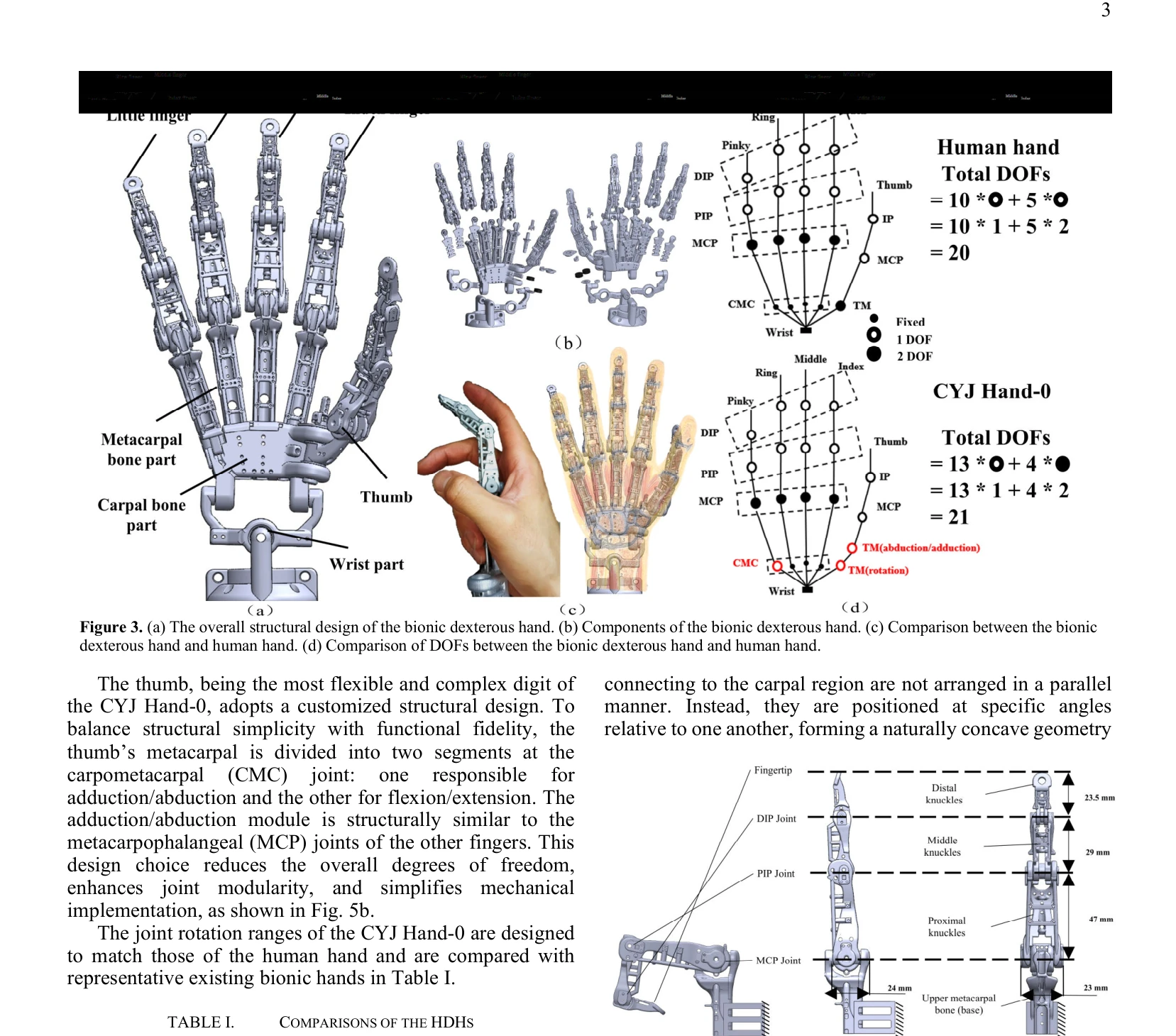
Figure 4. Structure and size of the universal finger.
총평: CYJ Hand-0는 SMA-모터 하이브리드 구동, 정교한 생체모방 설계, 효율적인 3D 프린팅 제조를 통해 경량이면서도 고성능의 휴머노이드 손을 실현한 주목할 만한 연구이며, 특히 모듈화 아키텍처와 포괄적 성능 평가가 강점이다.