Essence
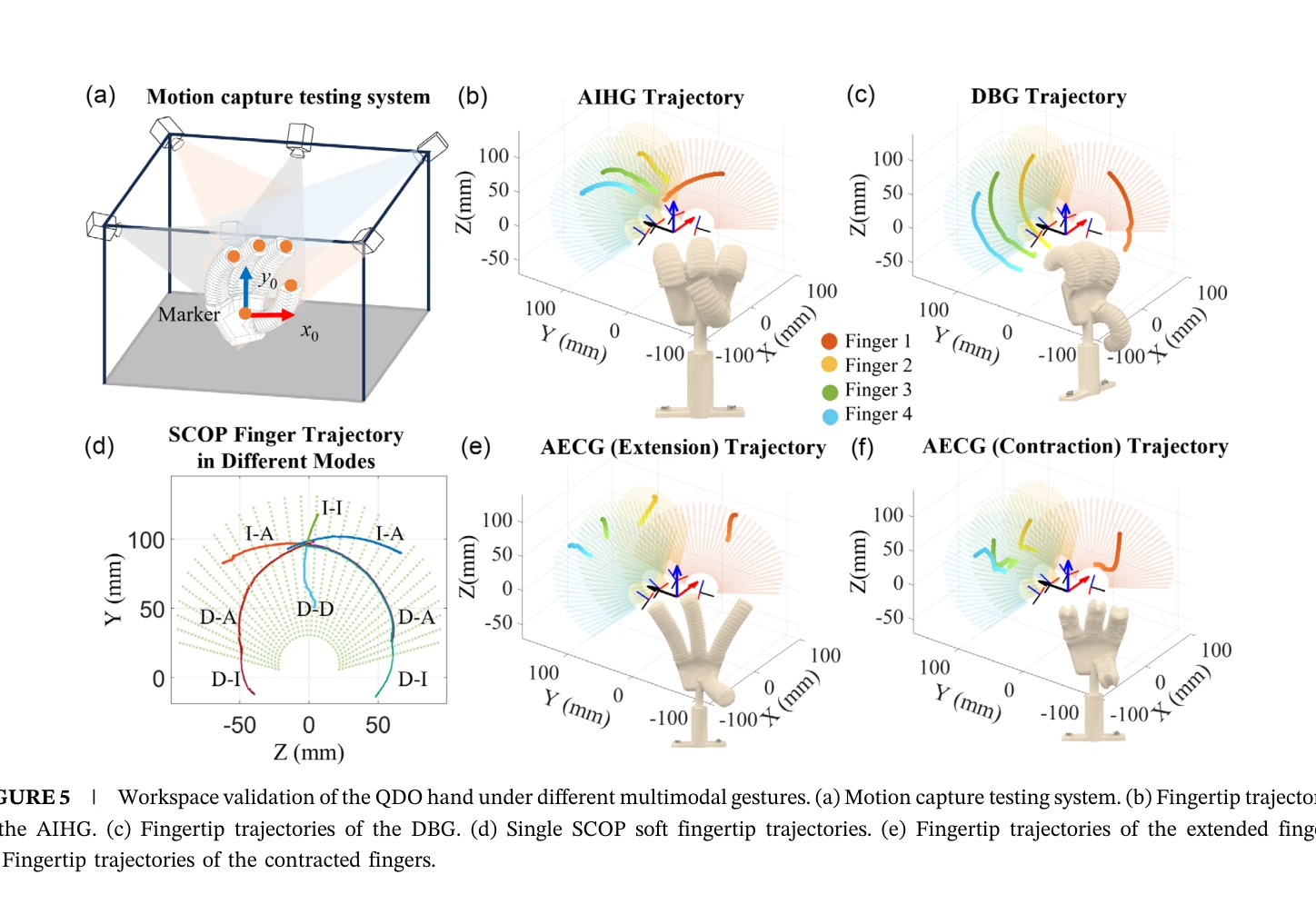
Figure 5b,c,e,f, respectively, illustrate the 3D fingertip trajectories
본 연구는 이중 챔버 SCOP actuator를 이용한 4지 소프트 로봇 핸드(QDO hand)를 제시하며, 양압과 음압 조절을 통해 축 방향 신축과 양방향 굽힘 등 다양한 운동 양식을 구현하여 5.2배 확대된 작업 공간을 달성한다.
저자: Qinlin Tan, Sipeng Zhou, Yanlin Chen, Tianqi Yang, Xiangyu Chu, Sicong Liu, Raymond Kai‐Yu Tong | 날짜: 2026-04-18 | DOI: 10.1002/aisy.70388 📄 PDF
Figure 5b,c,e,f, respectively, illustrate the 3D fingertip trajectories
본 연구는 이중 챔버 SCOP actuator를 이용한 4지 소프트 로봇 핸드(QDO hand)를 제시하며, 양압과 음압 조절을 통해 축 방향 신축과 양방향 굽힘 등 다양한 운동 양식을 구현하여 5.2배 확대된 작업 공간을 달성한다.
Figure 5b,c,e,f, respectively, illustrate the 3D fingertip trajectories
Figure 5b,c,e,f, respectively, illustrate the 3D fingertip trajectories
총평: 본 논문은 이중 챔버 SCOP actuator와 DCI-FLMG 제어 방식을 통해 소프트 로봇 핸드의 작업 공간 확대와 다중 운동 양식을 동시에 달성한 혁신적 연구이며, 인간-로봇 협업과 복잡한 환경에서의 조작 능력 향상에 크게 기여할 것으로 기대된다.