Essence
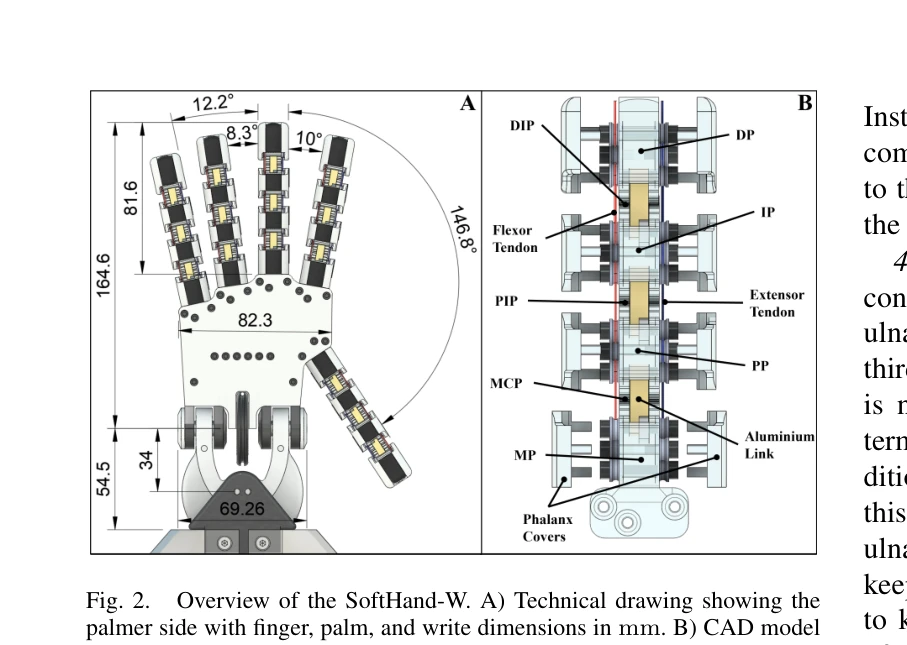
Fig. 2.
SoftHand Model-W는 3D 프린팅 기반의 인간형 로봇 손으로, 2-DoF 손목을 통합하여 손가락의 underactuated tendon-driven 구조와 손목의 능동적 제어를 결합했다. Carpal tunnel 영감의 힘줄 라우팅을 통해 원격 모터 배치를 가능하게 하면서 compact한 형태를 유지한다.
저자: | 날짜: 2026-03-31 | URL: https://arxiv.org/list/cs.RO/current 📄 PDF
Fig. 2.
SoftHand Model-W는 3D 프린팅 기반의 인간형 로봇 손으로, 2-DoF 손목을 통합하여 손가락의 underactuated tendon-driven 구조와 손목의 능동적 제어를 결합했다. Carpal tunnel 영감의 힘줄 라우팅을 통해 원격 모터 배치를 가능하게 하면서 compact한 형태를 유지한다.
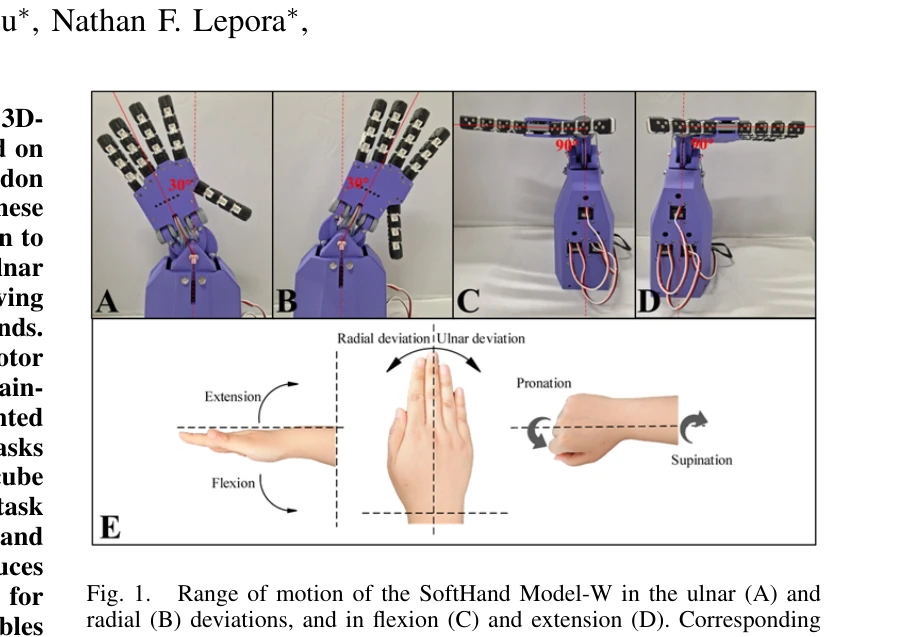
Fig. 1.
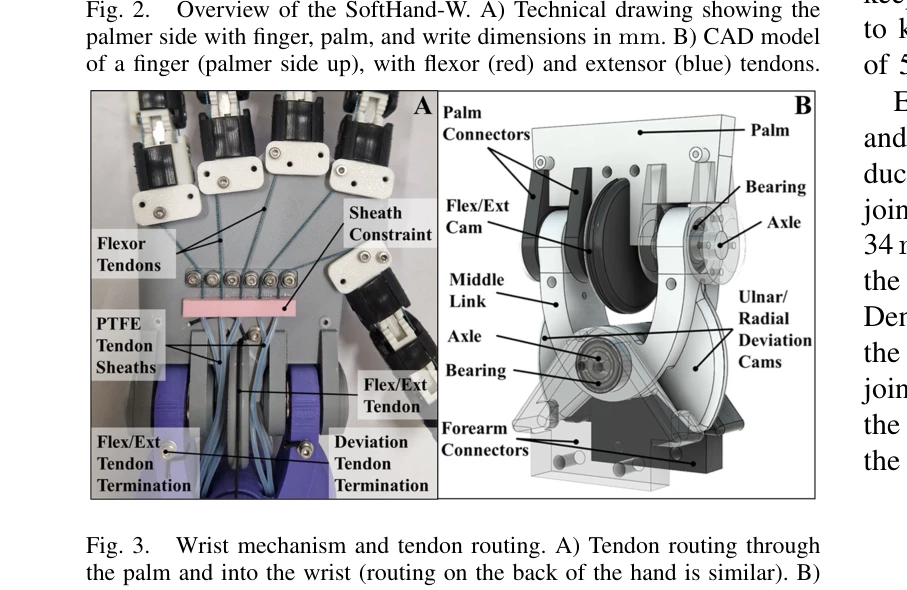
Fig. 3.
총평: SoftHand Model-W는 soft robotics의 adaptive synergies 개념을 유지하면서 능동적 손목을 처음 통합한 혁신적 설계이며, 3D 프린팅과 carpal tunnel routing을 통해 실용성과 anthropomorphism을 동시에 달성했다. 손목 추가의 명확한 성능 개선 효과를 입증하여 dexterous manipulation 분야에 의미 있는 기여를 한다.