Essence
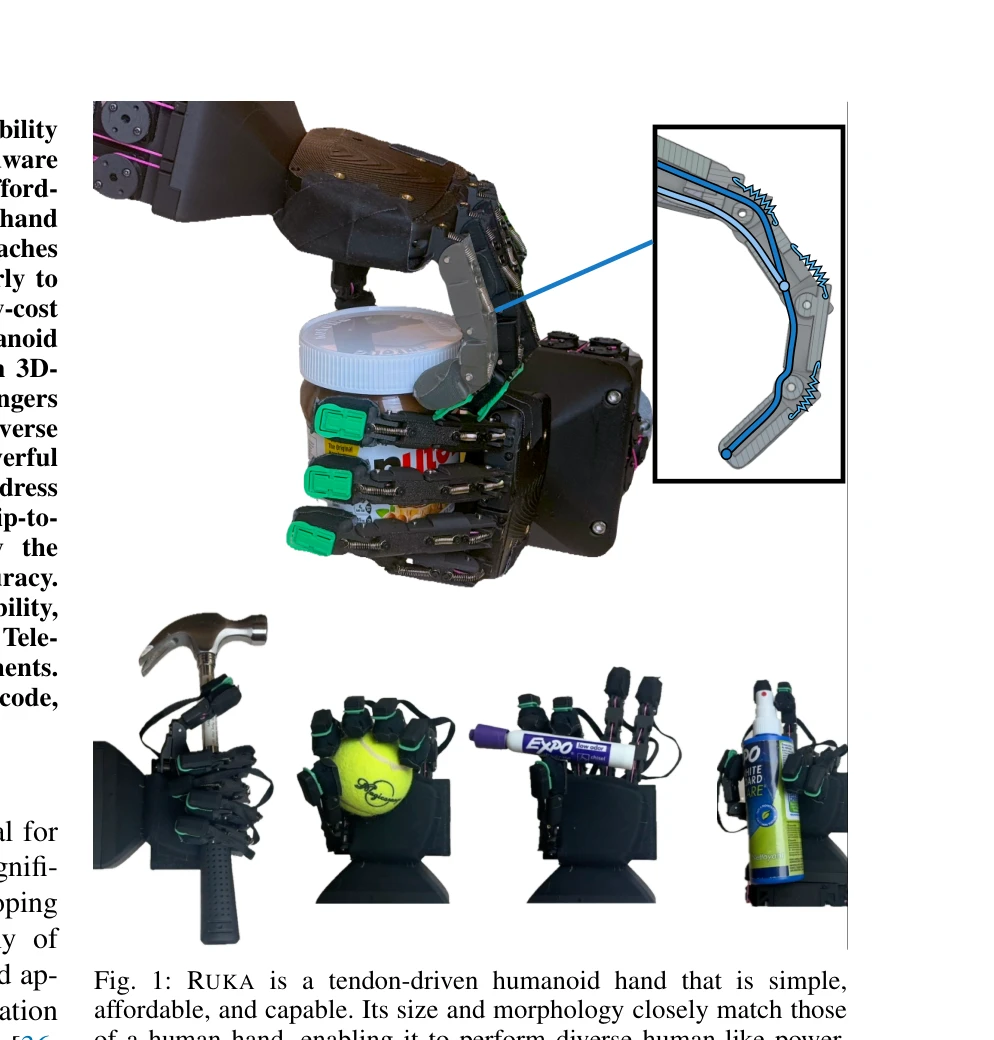
Fig. 1: RUKA is a tendon-driven humanoid hand that is simple,
RUKA는 3D 프린팅과 저가 부품으로 제작한 tendon-driven humanoid hand로, learning-based control을 통해 정밀성, 컴팩트성, 강도, 저비용을 동시에 달성한다.
저자: Anya Zorin, Irmak Guzey, Billy Yan, Aadhithya Iyer, Lisa Kondrich, Nikhil X. Bhattasali, Lerrel Pinto | 날짜: 2025-04-17 | URL: https://arxiv.org/abs/2504.13165 📄 PDF
Fig. 1: RUKA is a tendon-driven humanoid hand that is simple,
RUKA는 3D 프린팅과 저가 부품으로 제작한 tendon-driven humanoid hand로, learning-based control을 통해 정밀성, 컴팩트성, 강도, 저비용을 동시에 달성한다.
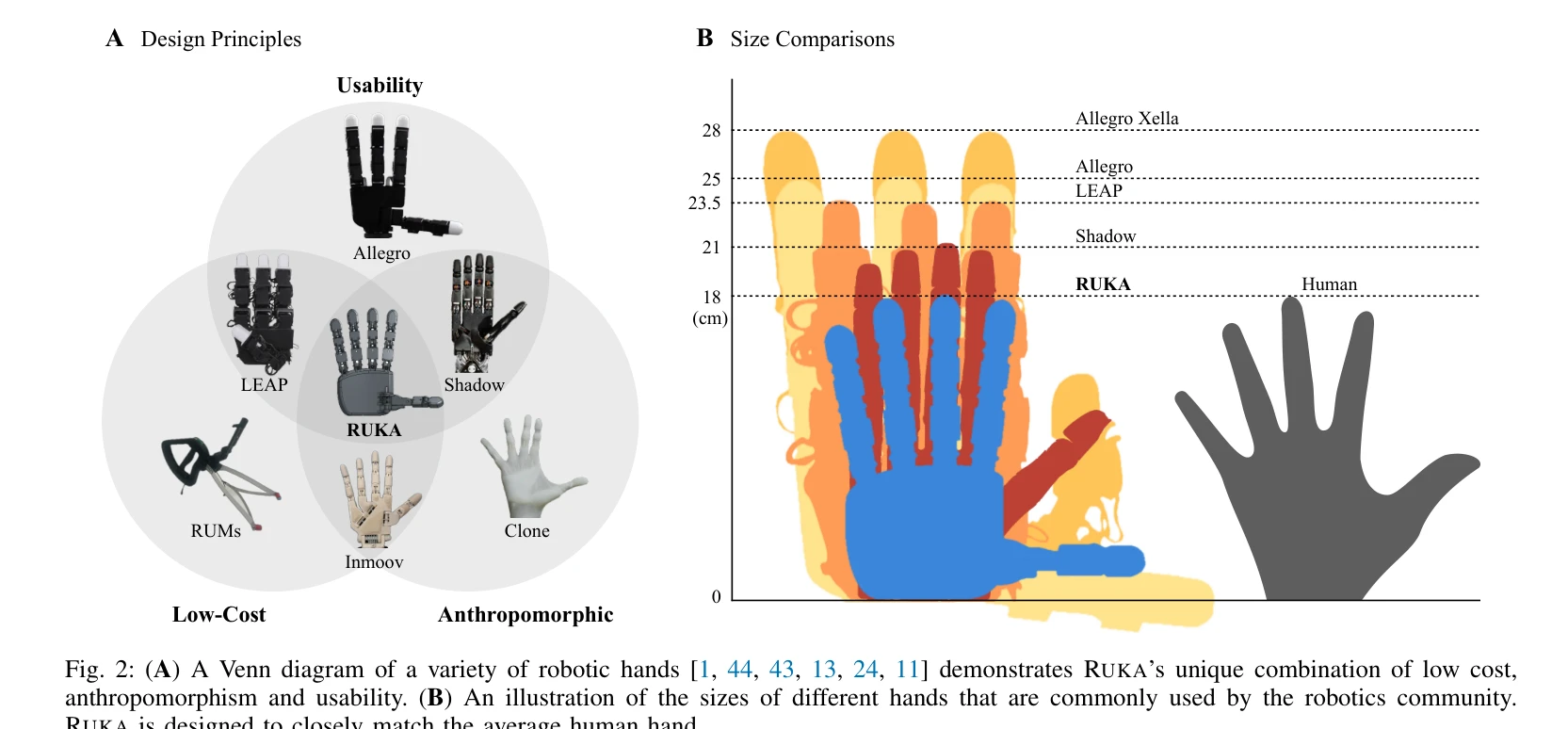
Fig. 2: (A) A Venn diagram of a variety of robotic hands [1, 44, 43, 13, 24, 11] demonstrates RUKA’s unique combination
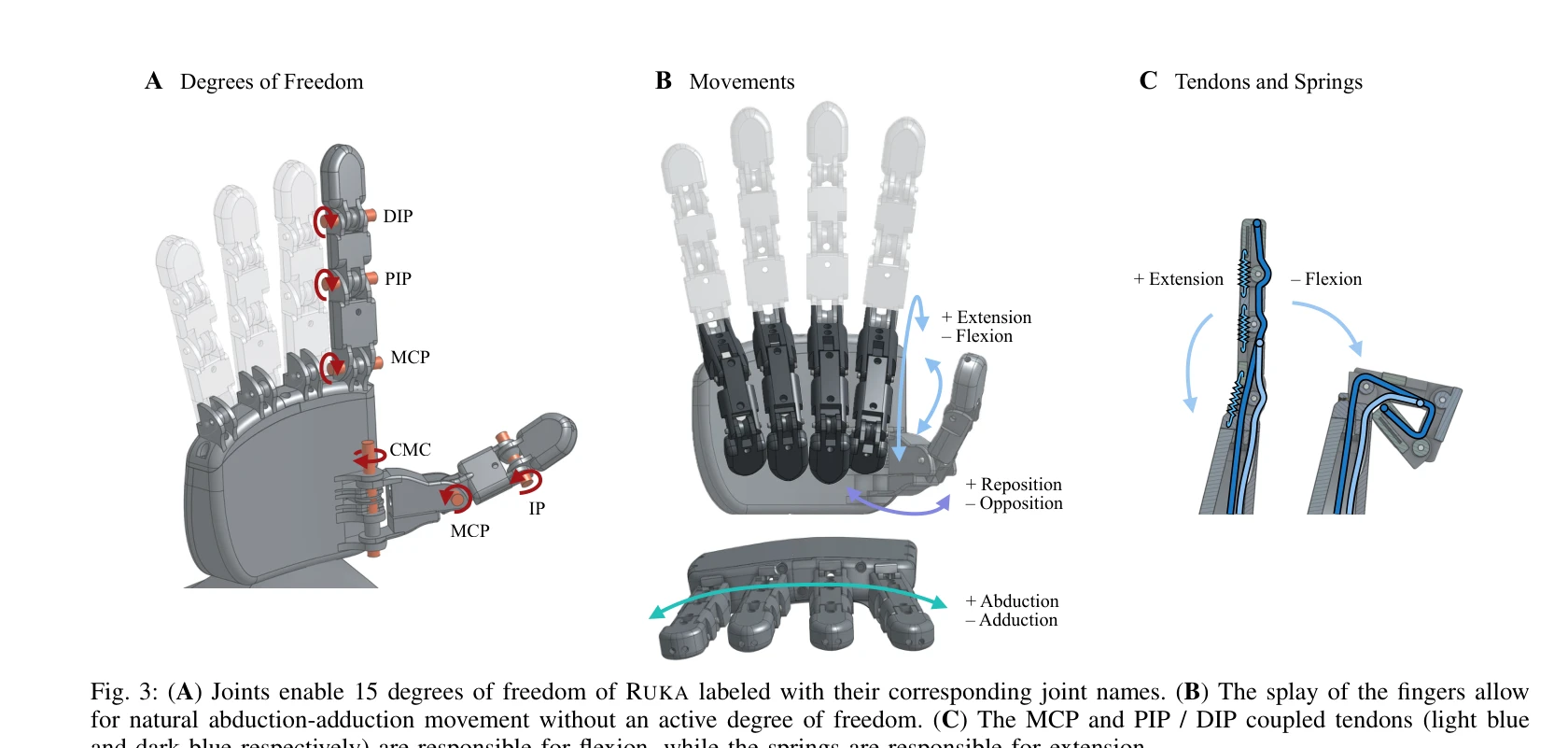
Fig. 3: (A) Joints enable 15 degrees of freedom of RUKA labeled with their corresponding joint names. (B) The splay of t
총평: RUKA는 learning-based control과 실용적 hardware 설계를 결합하여 저비용 대 성능 비율에서 로봇 손 영역의 새로운 기준을 제시하며, open-source 공개로 접근성을 극대화한 의미 있는 기여이다.