Essence
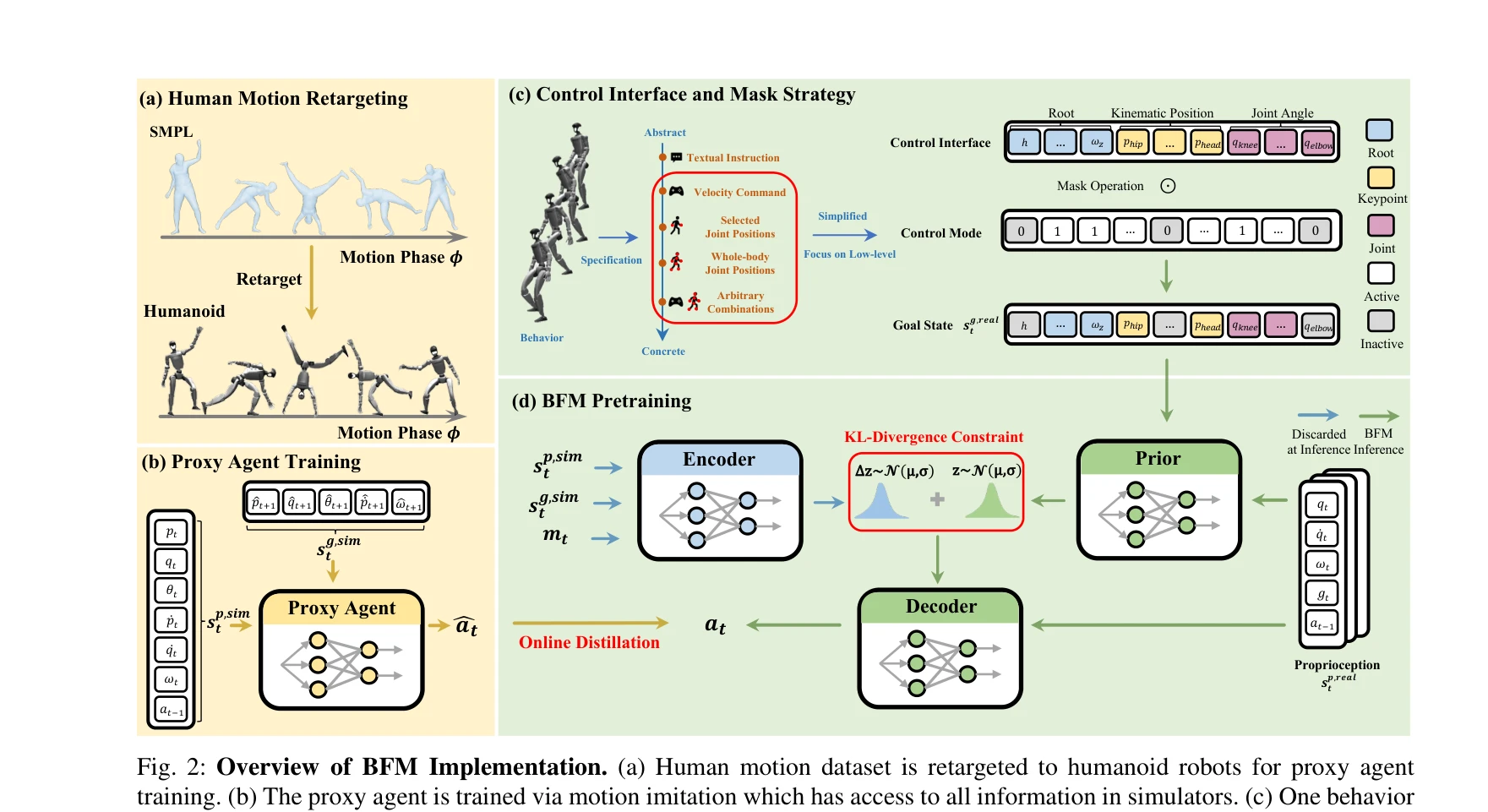
Fig. 2: Overview of BFM Implementation. (a) Human motion dataset is retargeted to humanoid robots for proxy agent
본 논문은 휴머노이드 로봇의 다양한 제어 태스크에 일반화 가능한 행동 기반 파운데이션 모델(BFM)을 제안하며, masked online distillation과 CVAE를 결합하여 대규모 행동 데이터셋으로 사전학습한다.
저자: Weishuai Zeng, Shunlin Lu, Kangning Yin, Xiaojie Niu, Minyue Dai, Jingbo Wang, Jiangmiao Pang | 날짜: 2025-09-17 | DOI: 10.48550/arXiv.2509.13780 📄 PDF
Fig. 2: Overview of BFM Implementation. (a) Human motion dataset is retargeted to humanoid robots for proxy agent
본 논문은 휴머노이드 로봇의 다양한 제어 태스크에 일반화 가능한 행동 기반 파운데이션 모델(BFM)을 제안하며, masked online distillation과 CVAE를 결합하여 대규모 행동 데이터셋으로 사전학습한다.
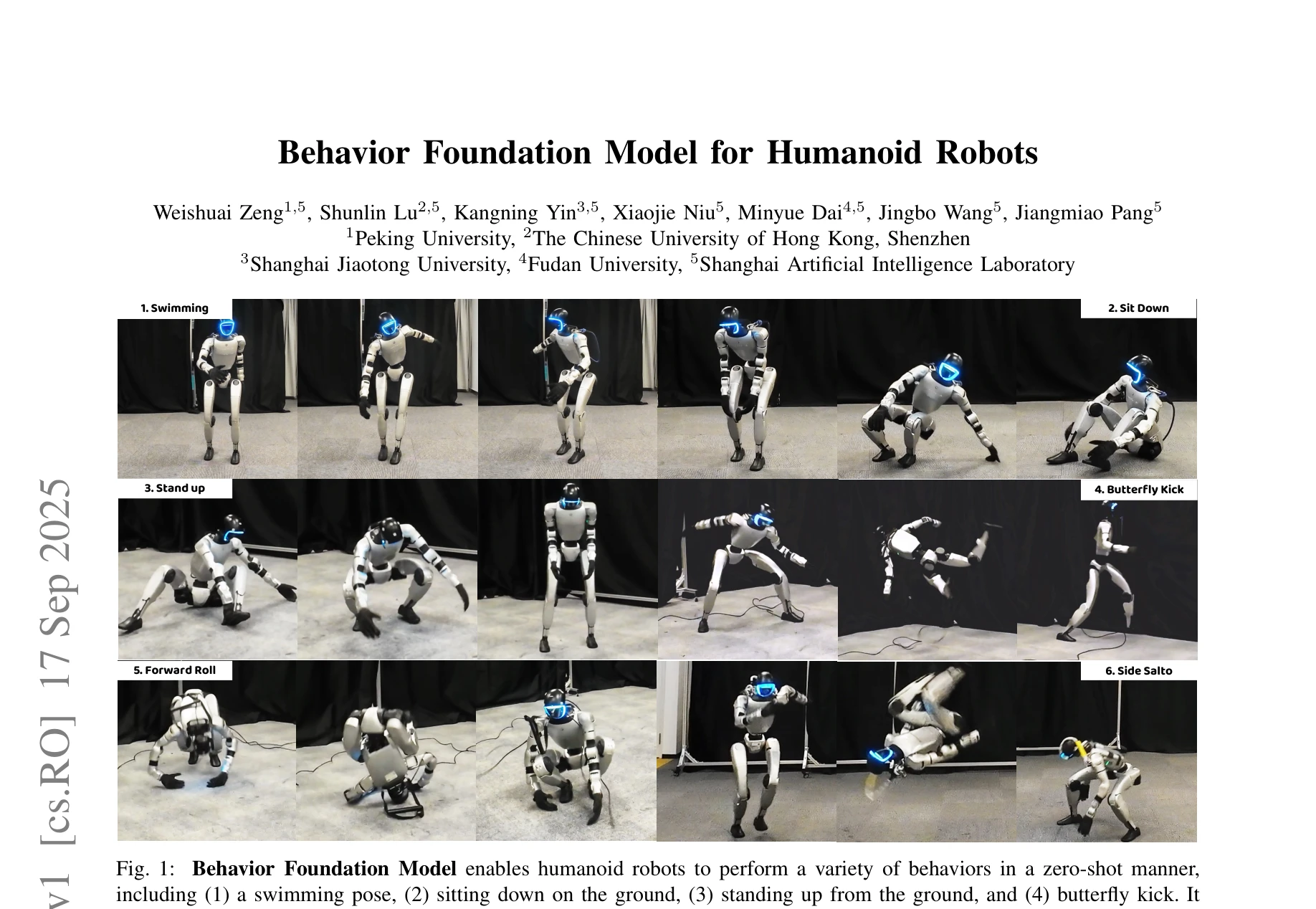
Fig. 1: Behavior Foundation Model enables humanoid robots to perform a variety of behaviors in a zero-shot manner,
Fig. 2: Overview of BFM Implementation. (a) Human motion dataset is retargeted to humanoid robots for proxy agent
총평: 본 논문은 휴머노이드 로봇 제어의 통합 행동 학습 패러다임을 명확히 제시하고 masked online distillation과 CVAE를 통한 실제적 구현으로 다양한 제어 모드 지원과 빠른 신행동 습득을 실현했으며, 시뮬레이션과 실제 플랫폼 양쪽에서 광범위하게 검증하여 범용 휴머노이드 제어의 새로운 방향을 제시한다.