저자: Xuetao Li, Wenke Huang, Nengyuan Pan, Kaiyan Zhao, Songhua Yang, Yiming Wang, Mengde Li, Mang Ye, Jifeng Xuan, Miao Li | 날짜: 2025-11-12 | URL: https://arxiv.org/abs/2511.09141 📄 PDF
Essence
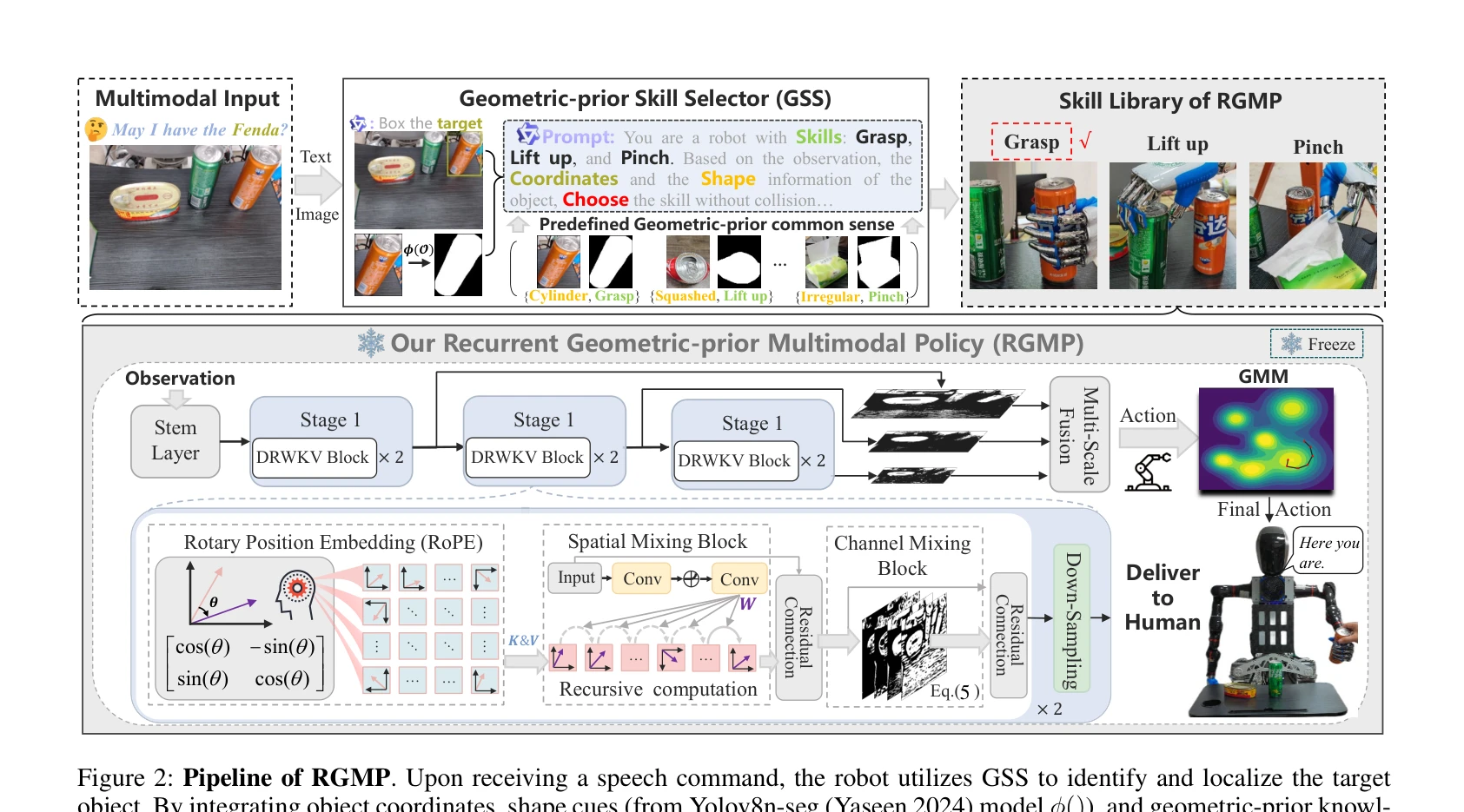
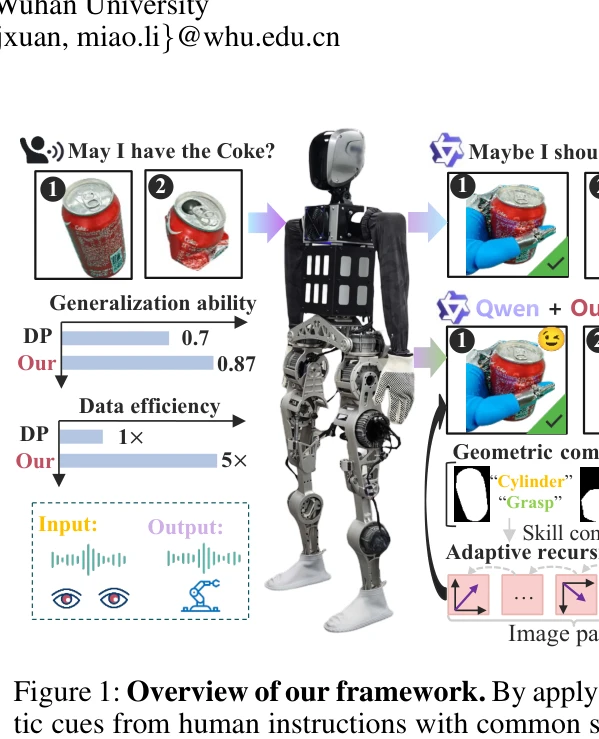
Figure 2: Pipeline of RGMP. Upon receiving a speech command, the robot utilizes GSS to identify and localize the target
기하학적 추론과 데이터 효율성을 결합한 RGMP는 humanoid robot 조작을 위해 Geometric-prior Skill Selector와 Adaptive Recursive Gaussian Network를 통합하여 87% 성공률과 5배 데이터 효율을 달성한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: RGMP는 기하학적 추론과 데이터 효율성의 결합을 통해 humanoid robot 조작의 중요한 문제를 해결하며, GSS와 ARGN의 설계가 정교하고 실제 로봇에서 strong empirical result를 달성한 우수한 연구이다. 다만 기하학적 제약의 자동화와 더 광범위한 실증 평가가 이루어진다면 더욱 강력할 것으로 판단된다.