Essence
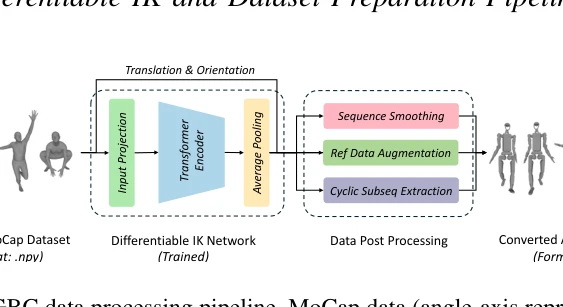
Fig. 1. GBC data processing pipeline. MoCap data (angle-axis representation)
GBC는 이질적인 휴머노이드 로봇들을 위한 통합 행동 모방 프레임워크로, differentiable IK 기반 데이터 파이프라인, DAgger-MMPPO 알고리즘, MMTransformer 아키텍처를 결합하여 인간 모션캡처 데이터를 다양한 로봇에 자동으로 재타겟팅하고 학습한다.
저자: Yifei Yao, Chengyuan Luo, Jiaheng Du, Wentao He, Jun-Guo Lu | 날짜: 2025-08-13 | DOI: 10.48550/arXiv.2508.09960 📄 PDF
Fig. 1. GBC data processing pipeline. MoCap data (angle-axis representation)
GBC는 이질적인 휴머노이드 로봇들을 위한 통합 행동 모방 프레임워크로, differentiable IK 기반 데이터 파이프라인, DAgger-MMPPO 알고리즘, MMTransformer 아키텍처를 결합하여 인간 모션캡처 데이터를 다양한 로봇에 자동으로 재타겟팅하고 학습한다.
Fig. 1. GBC data processing pipeline. MoCap data (angle-axis representation)
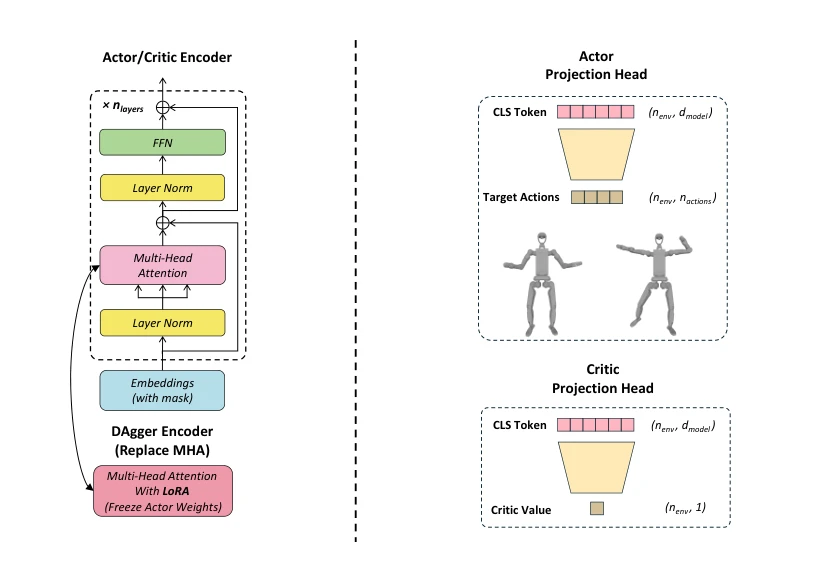
Fig. 5. MMTransformer architecture. MMTransformer follows a BERT style encoder design, and treats humanoid observations
총평: 본 논문은 이질적 휴머노이드 로봇들의 행동 모방을 위한 첫 번째 통합 프레임워크를 제시하며, differentiable IK, MMTransformer, DAgger-MMPPO 알고리즘을 결합하여 데이터 처리부터 정책 학습까지 일원화된 솔루션을 제공한다. 오픈소스 플랫폼 제공과 다중 로봇 검증을 통해 실용성과 확장성을 입증했으나, 실제 로봇 배포 성능 및 동적 환경에서의 강건성에 대한 검증이 후속과제이다.