저자: Han Xue, Sikai Liang, Zhikai Zhang, Zicheng Zeng, Yun Liu, Yunrui Lian, Jilong Wang, Qingtao Liu, Xuesong Shi, Li Yi | 날짜: 2026-01-23 | DOI: 10.48550/arXiv.2601.16035 📄 PDF
Essence
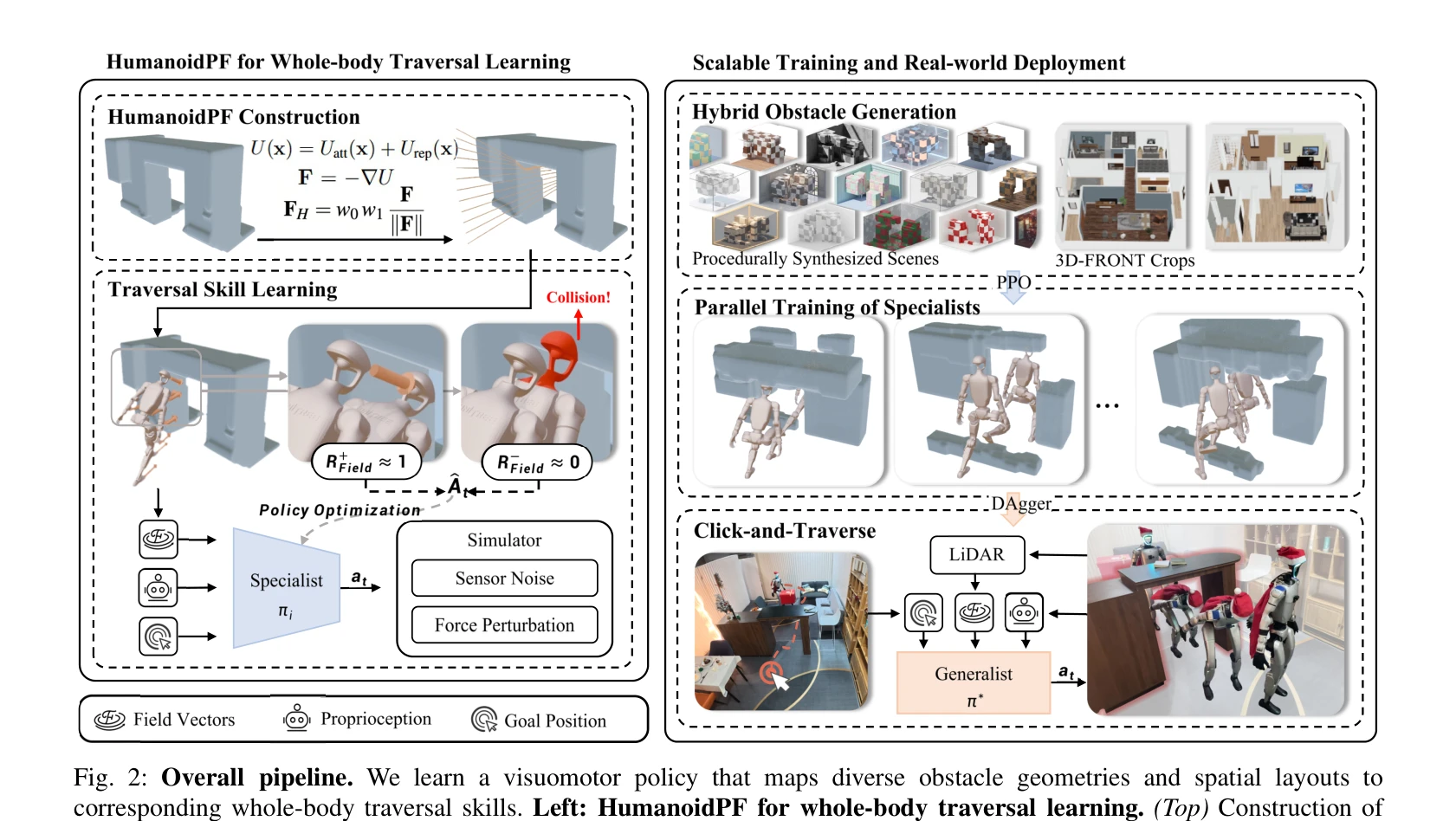
Fig. 2: Overall pipeline. We learn a visuomotor policy that maps diverse obstacle geometries and spatial layouts to
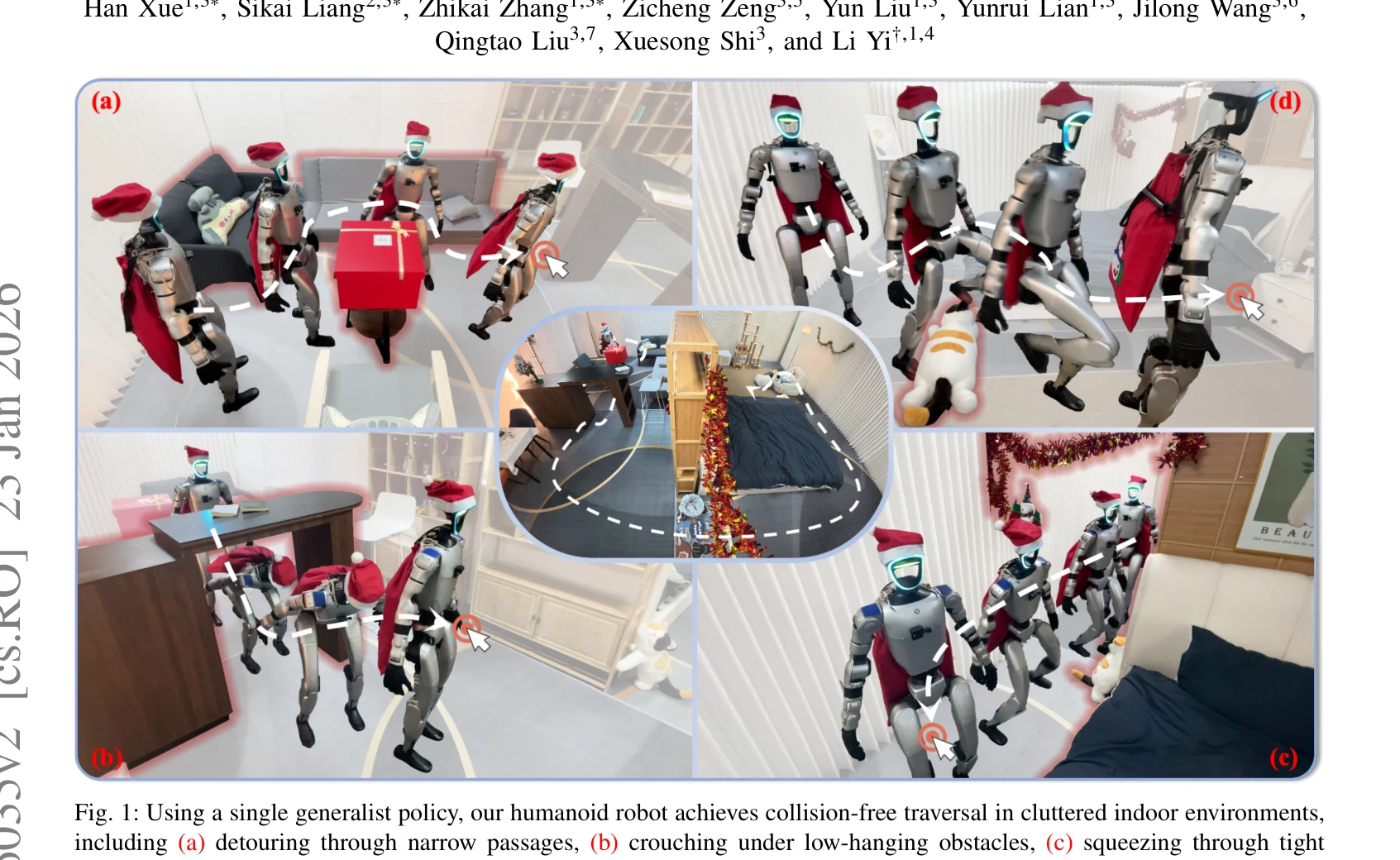
인간형 로봇이 어수선한 실내 환경에서 장애물을 피하며 이동할 수 있도록 Humanoid Potential Field (HumanoidPF)를 제안하고, 하이브리드 장면 생성 방식과 RL 기반 학습으로 현실 세계에 성공적으로 전이시킨 연구이다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 이 논문은 humanoid 로봇의 현실적 실내 이동이라는 중요한 문제를 체계적으로 처음 다루면서, HumanoidPF라는 창의적이고 효과적인 표현 방식과 하이브리드 scene generation을 통해 실제 로봇에의 성공적 전이를 보여준다. 기술적 깊이, 실험의 포괄성, 그리고 실용적 가치 측면에서 humanoid robotics 분야에 상당한 기여를 하는 우수한 연구이다.