Essence
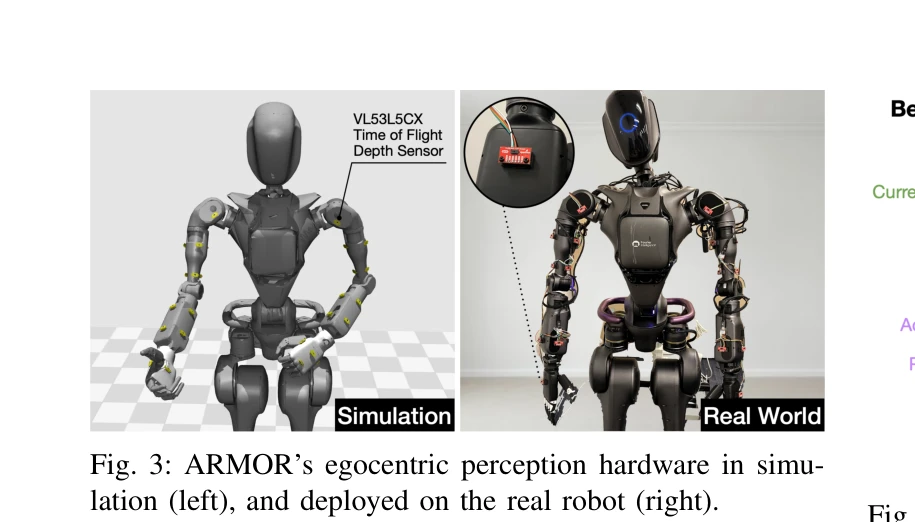
Fig. 3: ARMOR’s egocentric perception hardware in simu-
휴머노이드 로봇의 팔과 손에 분산 배치된 ToF 센서 기반의 자아중심 지각 시스템 ARMOR과 transformer 기반 모방학습 정책을 제시하여 밀집 환경에서의 충돌 회피 및 동작 계획을 수행한다.
저자: Daehwa Kim, Mario Srouji, Chen Chen, Jian Zhang | 날짜: 2024-11-30 | URL: https://arxiv.org/abs/2412.00396 📄 PDF
Fig. 3: ARMOR’s egocentric perception hardware in simu-
휴머노이드 로봇의 팔과 손에 분산 배치된 ToF 센서 기반의 자아중심 지각 시스템 ARMOR과 transformer 기반 모방학습 정책을 제시하여 밀집 환경에서의 충돌 회피 및 동작 계획을 수행한다.
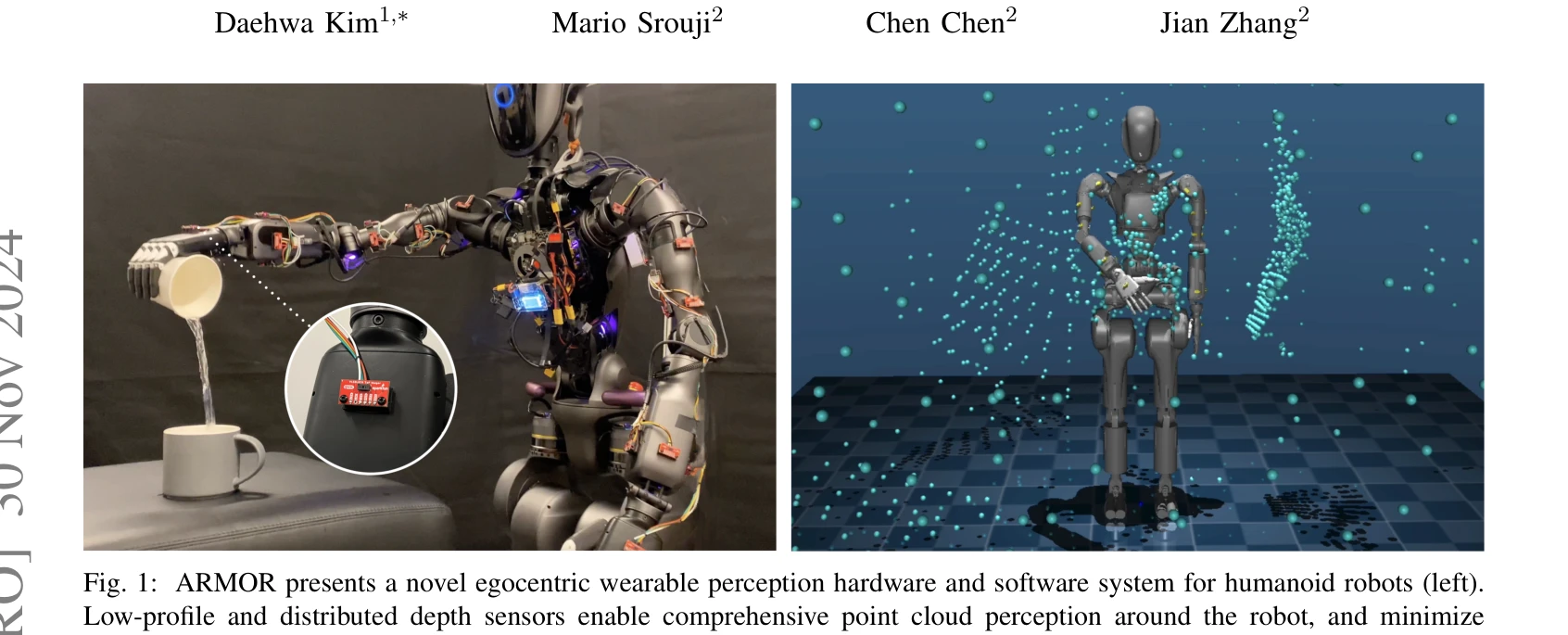
Fig. 1: ARMOR presents a novel egocentric wearable perception hardware and software system for humanoid robots (left).
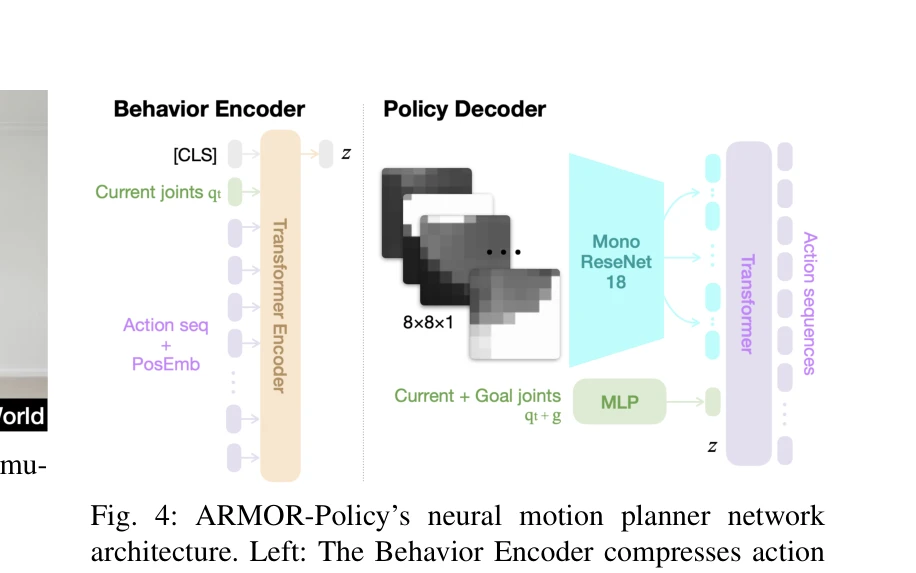
Fig. 4: ARMOR-Policy’s neural motion planner network
총평: 휴머노이드 로봇의 지각-계획 문제를 분산 ToF 센서와 인간 중심의 imitation learning으로 창의적으로 해결하며, 실제 배포와 의미 있는 성능 향상으로 실용성 높은 연구이다. 다만 센서 배치 최적화와 sim-to-real gap 논의 강화가 필요하다.