저자: Hang Liu, Yuman Gao, Sangli Teng, Yufeng Chi, Yakun Sophia Shao, Zhongyu Li, Maani Ghaffari, Koushil Sreenath | 날짜: 2026-03-08 | DOI: 10.48550/arXiv.2510.11682 📄 PDF
Essence
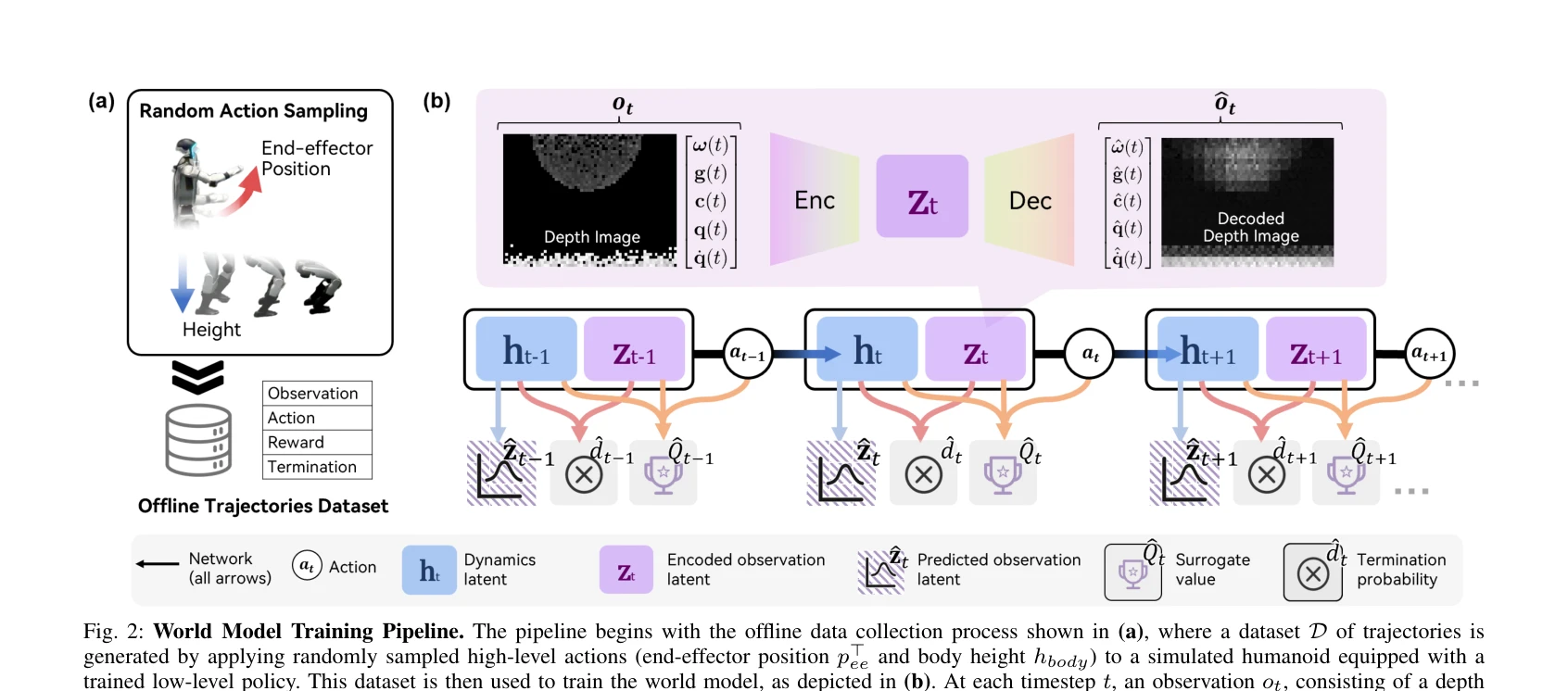
Fig. 2: World Model Training Pipeline. The pipeline begins with the offline data collection process shown in (a), where
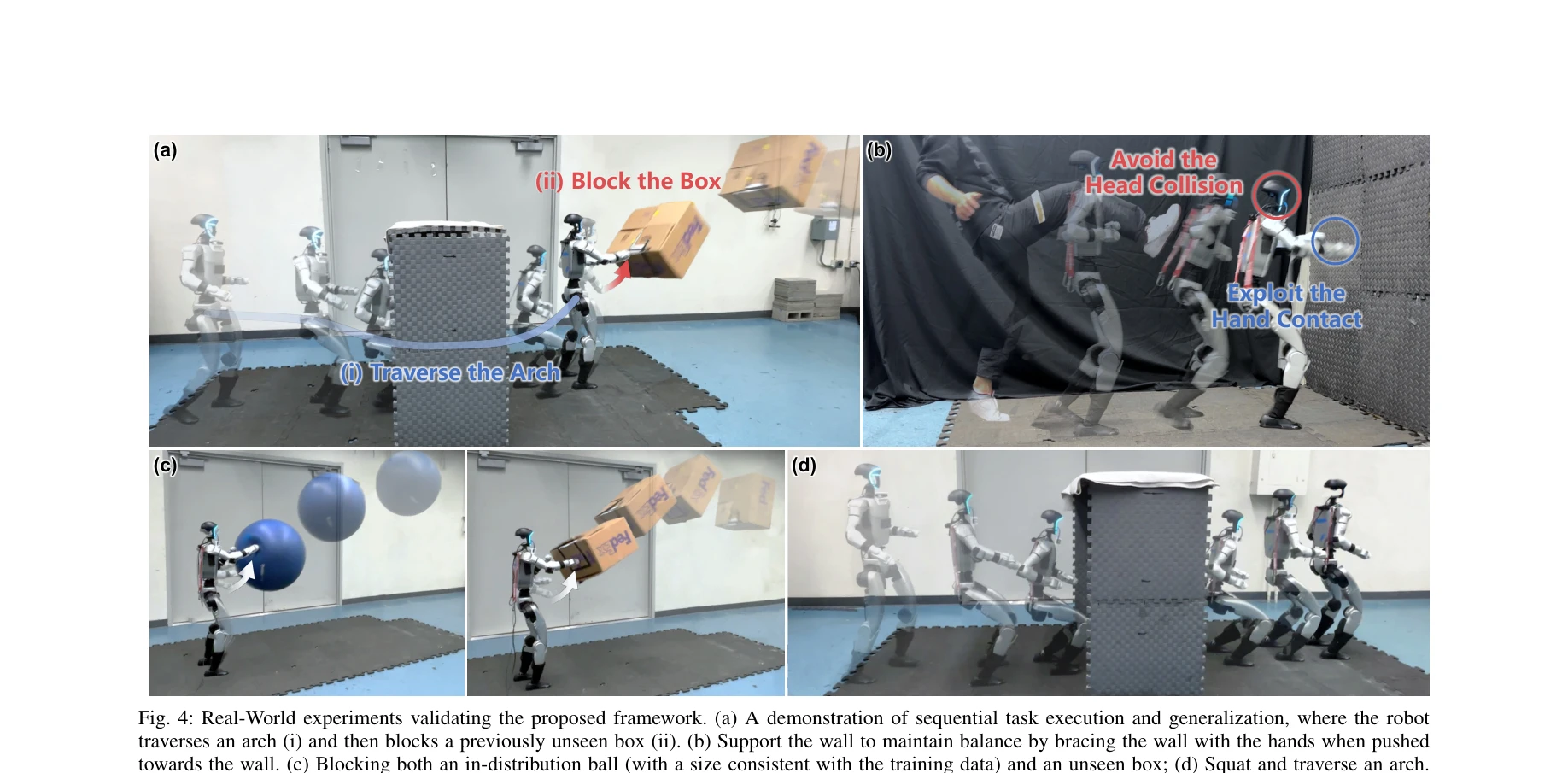
휴머노이드 로봇이 접촉을 활용하는 지능형 계획을 수립하기 위해 학습된 world model을 sampling-based MPC와 결합한 프레임워크를 제안하며, 오프라인 데이터셋으로부터 압축된 latent space에서 미래 결과를 예측한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 휴머노이드의 접촉 활용 계획을 위해 world model과 value-guided MPC를 효과적으로 결합하여 샘플 효율성과 다중 작업 능력을 동시에 달성한 우수한 연구로, 실제 로봇 배포를 통해 실용성을 입증했으나 계획 수평선 제약과 시뮬-현실 갭에 대한 추가 분석이 필요하다.