저자: Yushi Du, Yixuan Li, Baoxiong Jia, Yutang Lin, Pei Zhou, Wei Liang, Yanchao Yang, Siyuan Huang | 날짜: 2025-10-16 | DOI: 10.48550/arXiv.2510.14293 📄 PDF
Essence
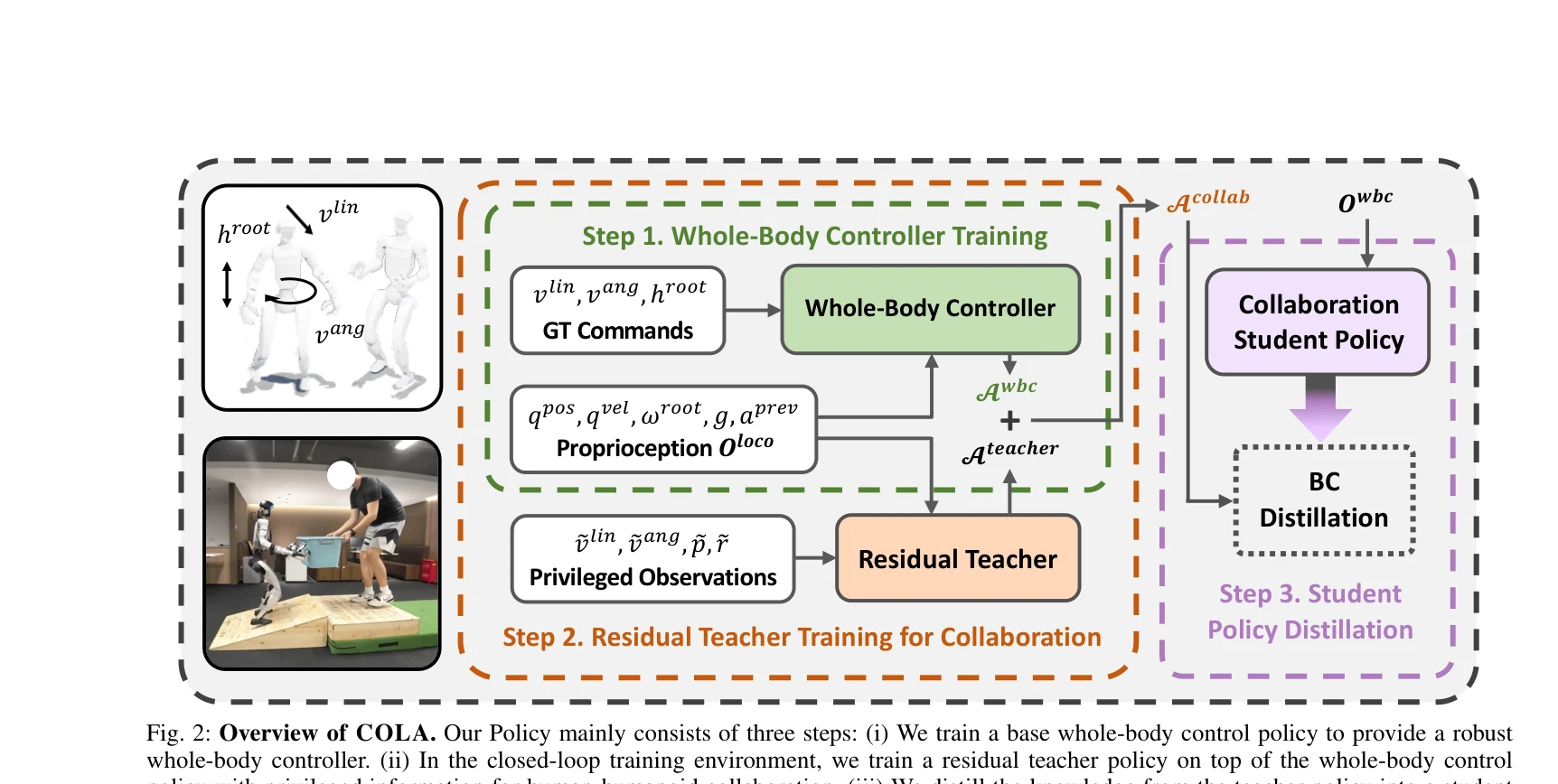
Fig. 2: Overview of COLA. Our Policy mainly consists of three steps: (i) We train a base whole-body control policy to pr
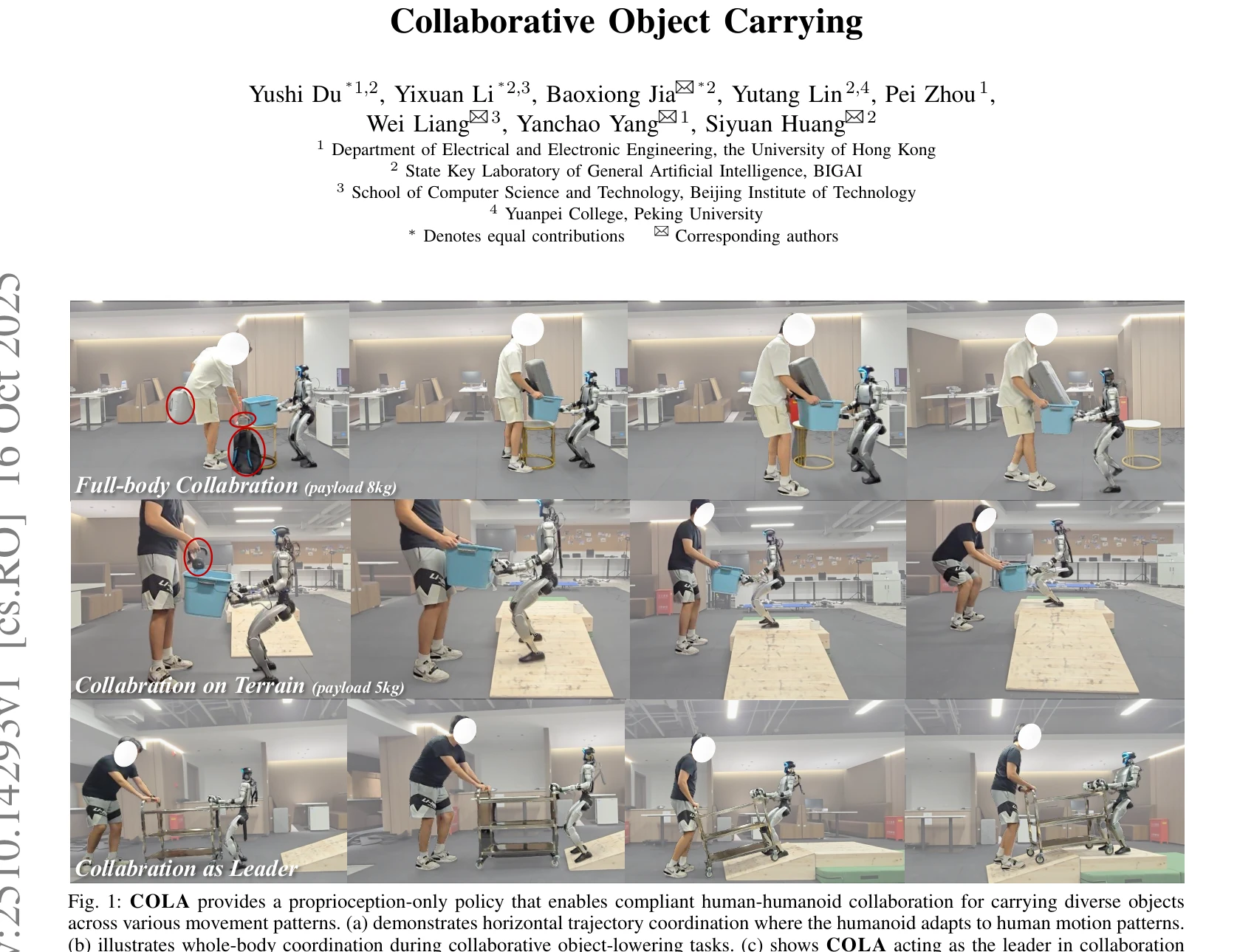
COLA는 proprioception만을 사용하는 reinforcement learning 기반의 정책으로, humanoid 로봇이 인간과 협력하여 물체를 운반할 때 적응적이고 안정적인 whole-body coordination을 가능하게 한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: COLA는 humanoid-human collaborative carrying이라는 실용적 과제에 대해 proprioception-only 정책으로 완전한 솔루션을 제시하며, three-step training framework와 implicit force modeling을 통해 높은 독창성을 보여준다. 시뮬레이션과 실제 환경에서 동시에 검증된 결과는 실제 배포 가능성을 시사하며, human user study를 통한 compliant collaboration 확인으로 실무적 가치를 입증한다.