Essence
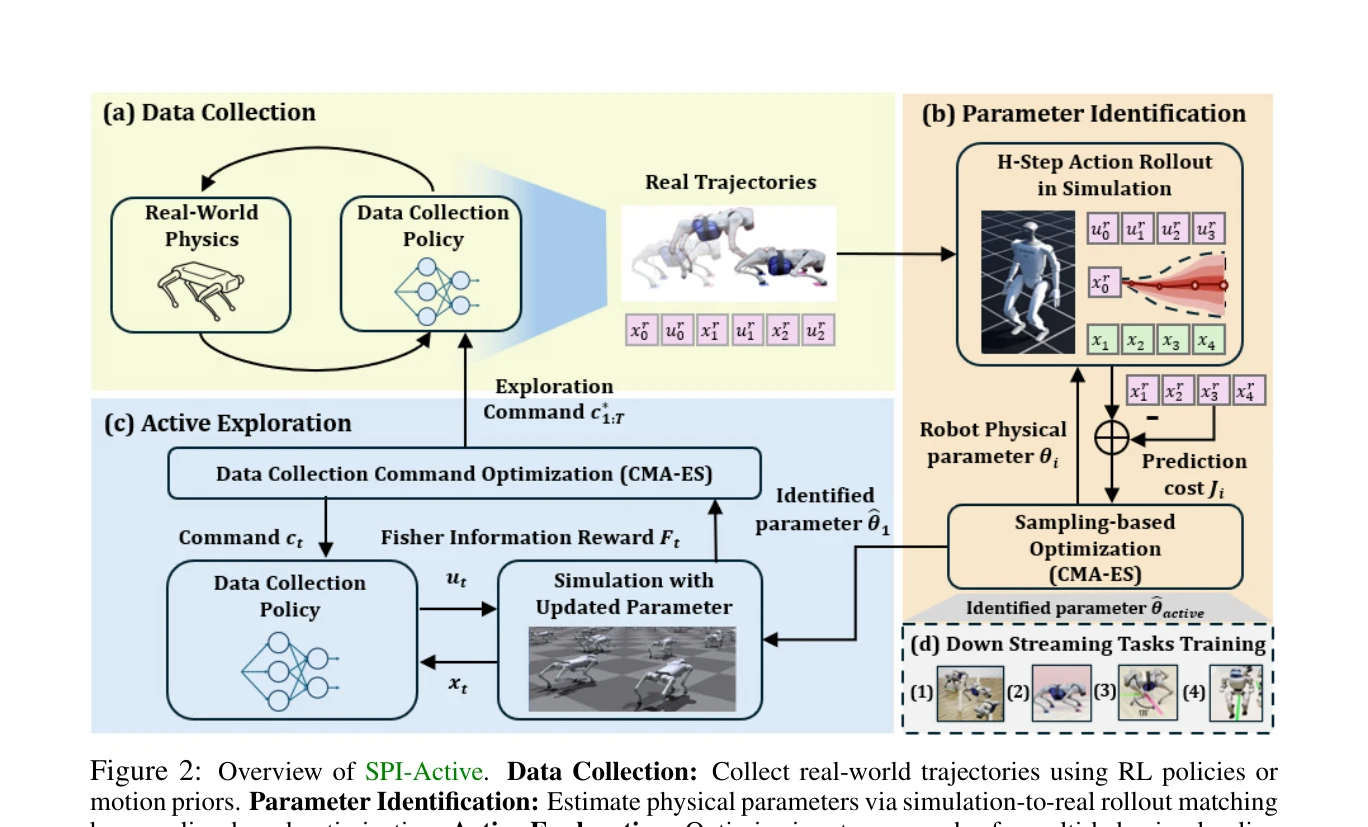
Figure 2: Overview of SPI-Active. Data Collection: Collect real-world trajectories using RL policies or
SPI-Active는 legged robot의 물리 파라미터를 샘플링 기반으로 식별하고 Fisher Information 최대화를 통한 active exploration으로 sim-to-real 갭을 최소화하는 two-stage 프레임워크이다.