Essence
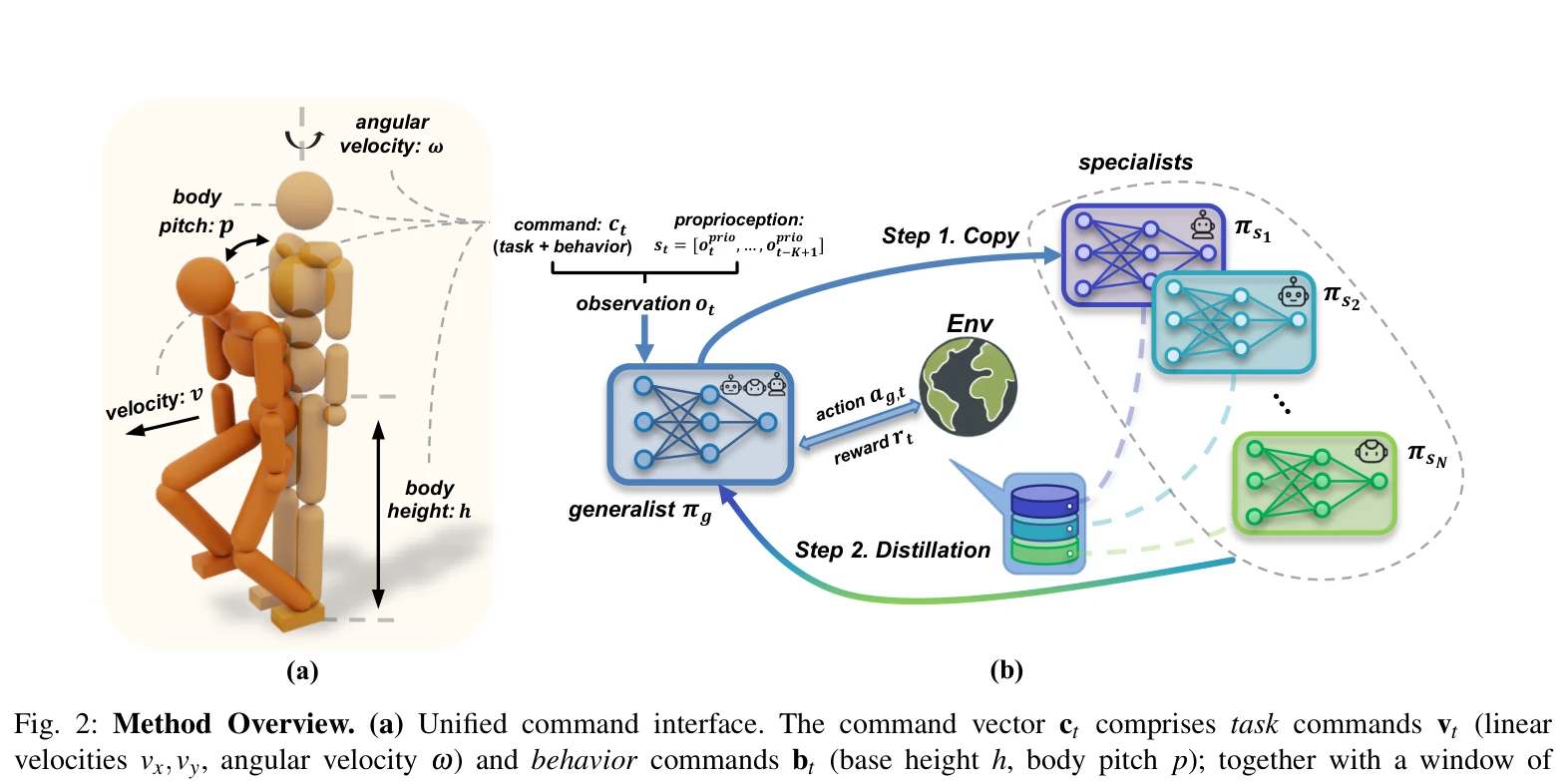
Fig. 2: Method Overview. (a) Unified command interface. The command vector ct comprises task commands vt (linear
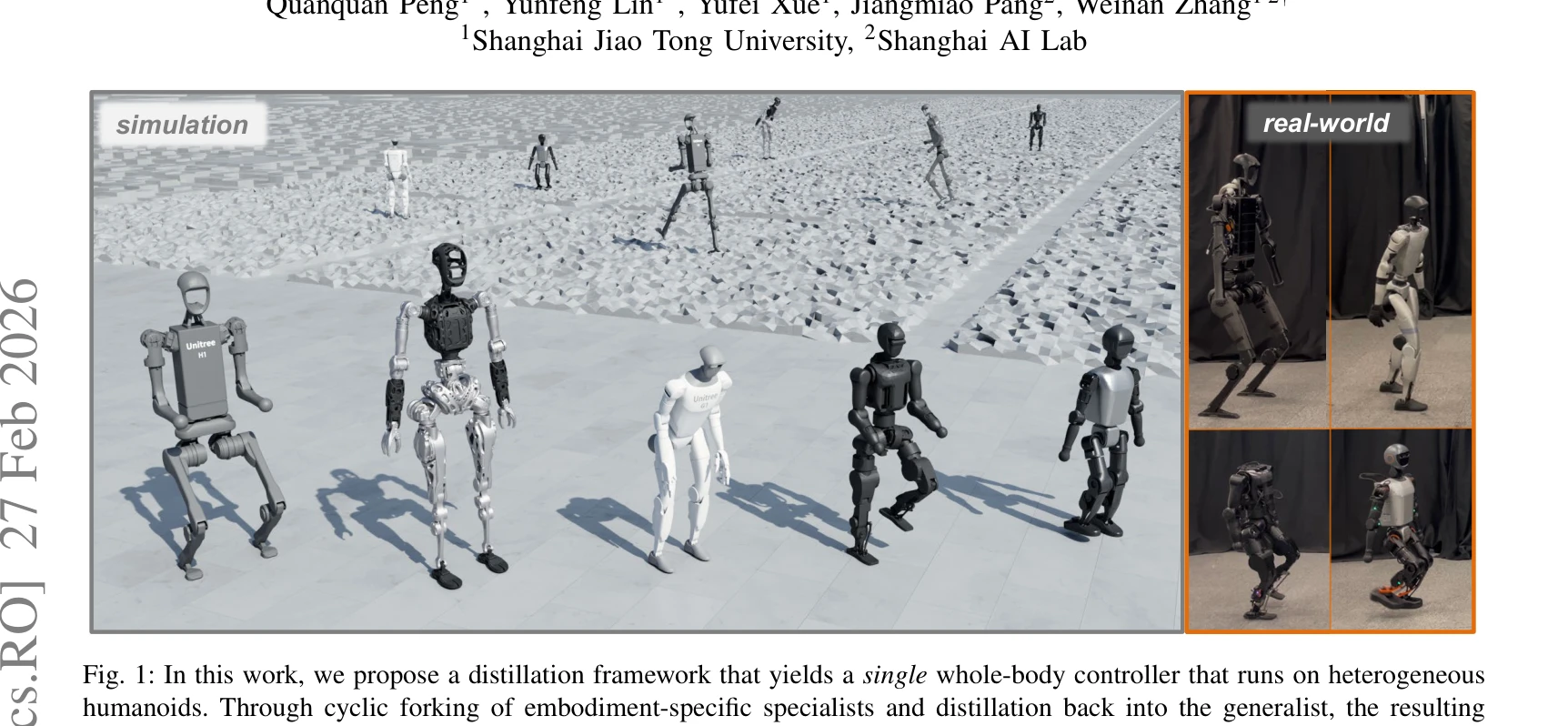
EAGLE는 다양한 휴머노이드 로봇을 단일 정책으로 제어하기 위한 embodiment-aware generalist-specialist distillation 프레임워크로, 반복적인 전문가 미세조정과 일반화 정책으로의 지식 증류를 통해 여러 이종 로봇에서 보행, 스쿼팅, 기울임 등 다양한 whole-body 제어를 가능하게 한다.