Essence
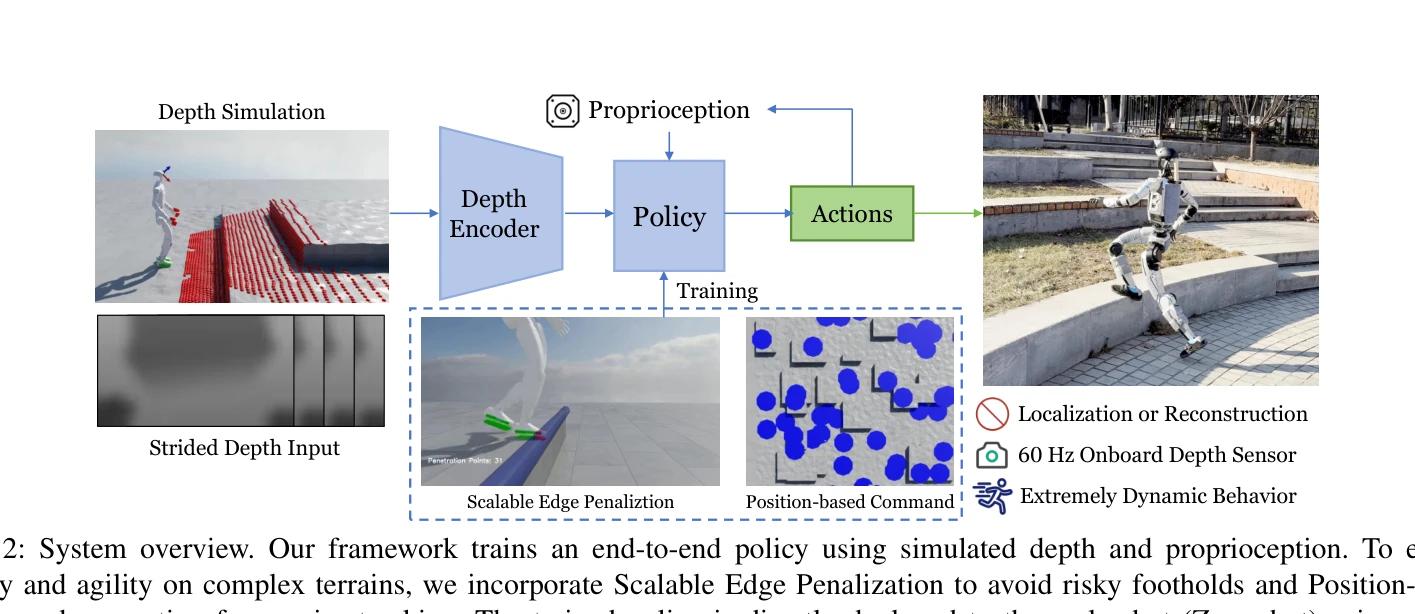
Fig. 2: System overview. Our framework trains an end-to-end policy using simulated depth and proprioception. To ensure
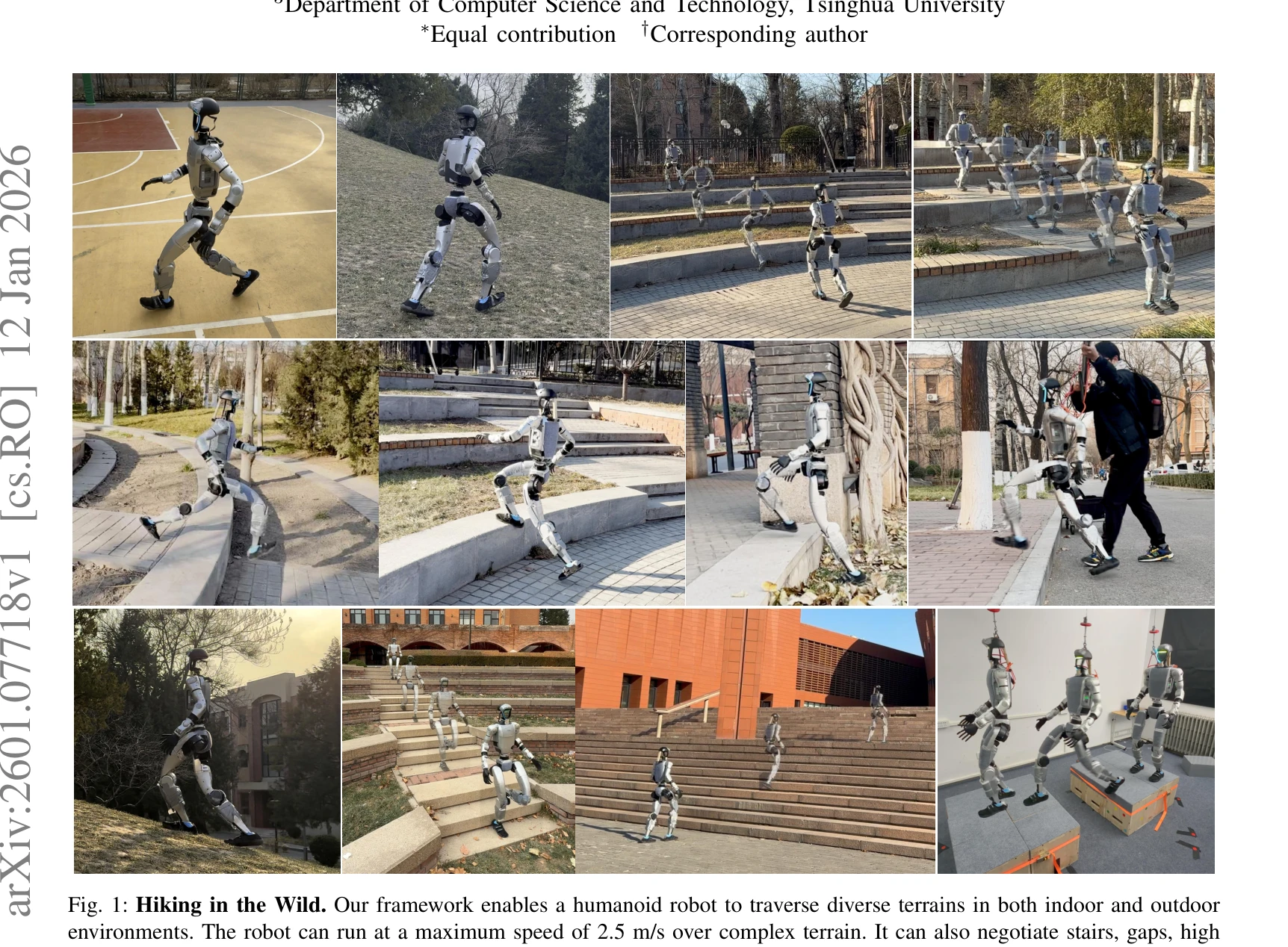
이 논문은 깊이 카메라와 proprioception을 직접 joint actions으로 변환하는 end-to-end RL 프레임워크를 제시하여, 외부 상태 추정 없이 humanoid 로봇이 복잡한 비정형 지형에서 최대 2.5 m/s의 속도로 안전하게 이동할 수 있게 한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 이 논문은 humanoid 로봇의 야외 주행을 위한 실용적이고 확장 가능한 end-to-end RL 프레임워크를 제시하며, Terrain Edge Detection, Foot Volume Points, Flat Patch Sampling 등 novel 메커니즘으로 safety와 reward hacking 문제를 효과적으로 해결한다. Open-source 배포와 실제 로봇 검증을 통해 높은 재현성과 실용성을 입증한 우수한 연구이다.