Essence
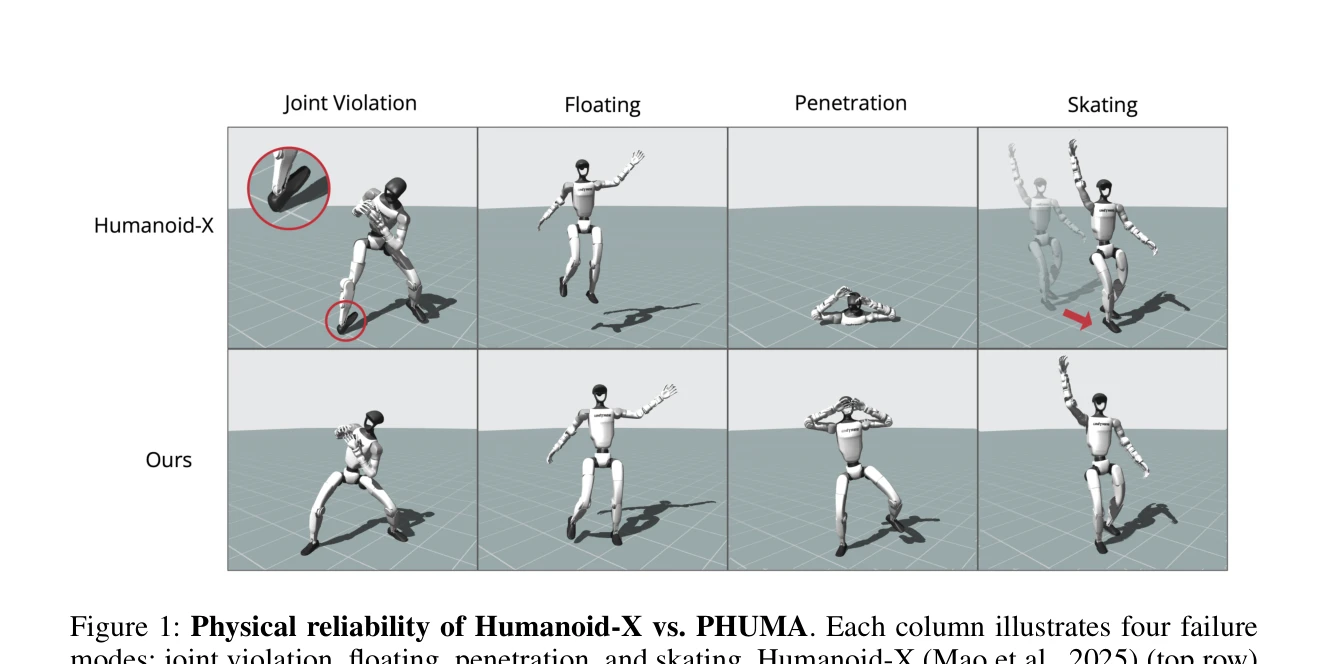
Figure 1: Physical reliability of Humanoid-X vs. PHUMA. Each column illustrates four failure
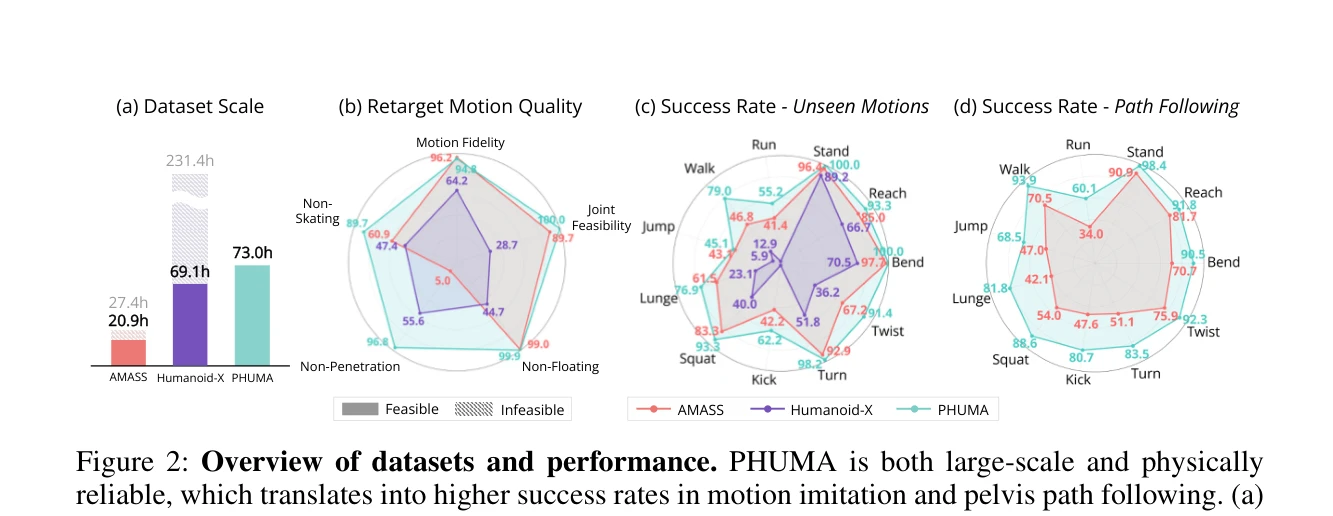
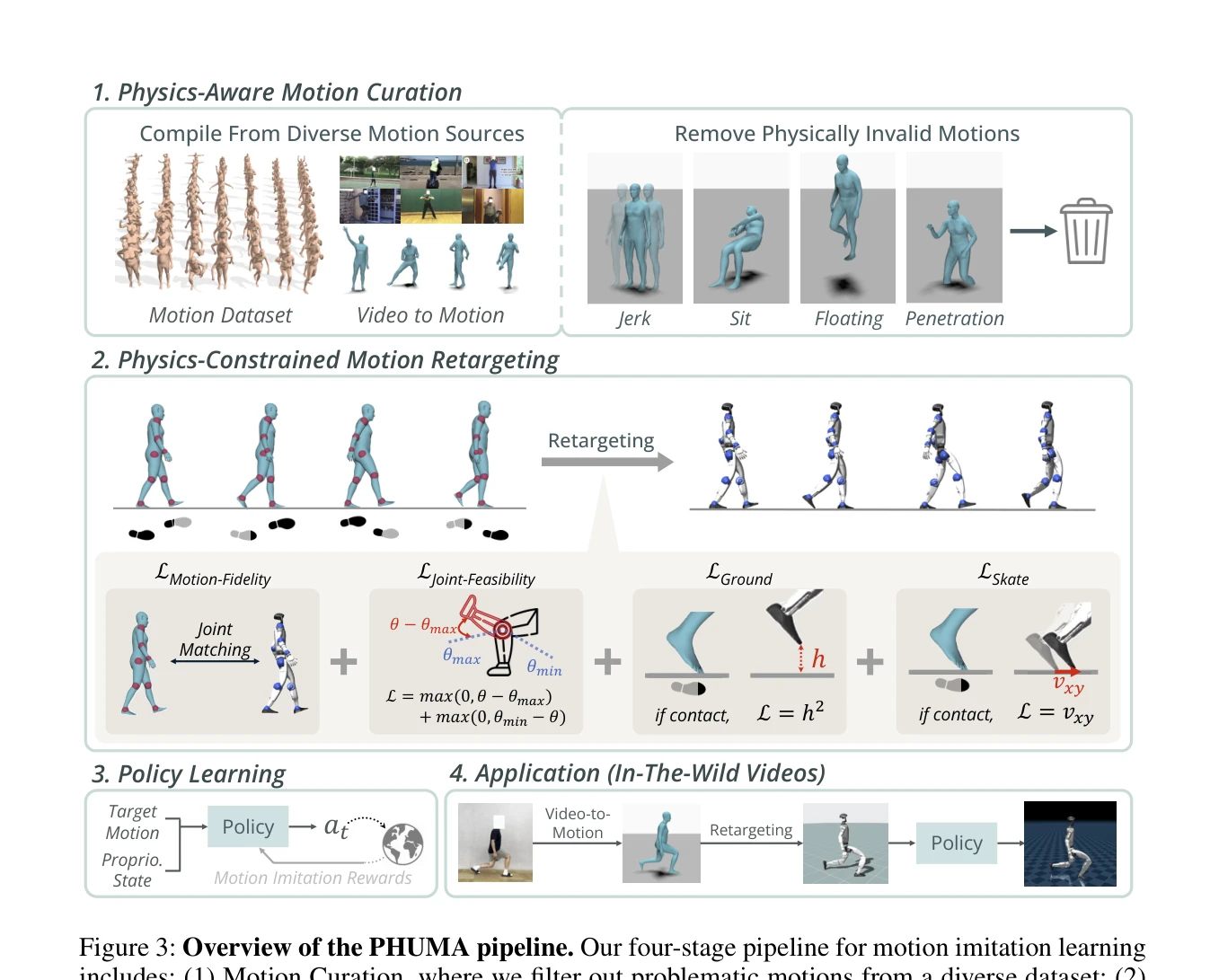
PHUMA는 대규모 인터넷 비디오로부터 인간다운 보행을 위한 물리적으로 타당한 휴머노이드 모션 데이터셋을 구축하며, 데이터 큐레이션과 physics-constrained retargeting을 통해 floating, penetration, foot skating 등의 물리적 artifacts를 제거한다.