Essence
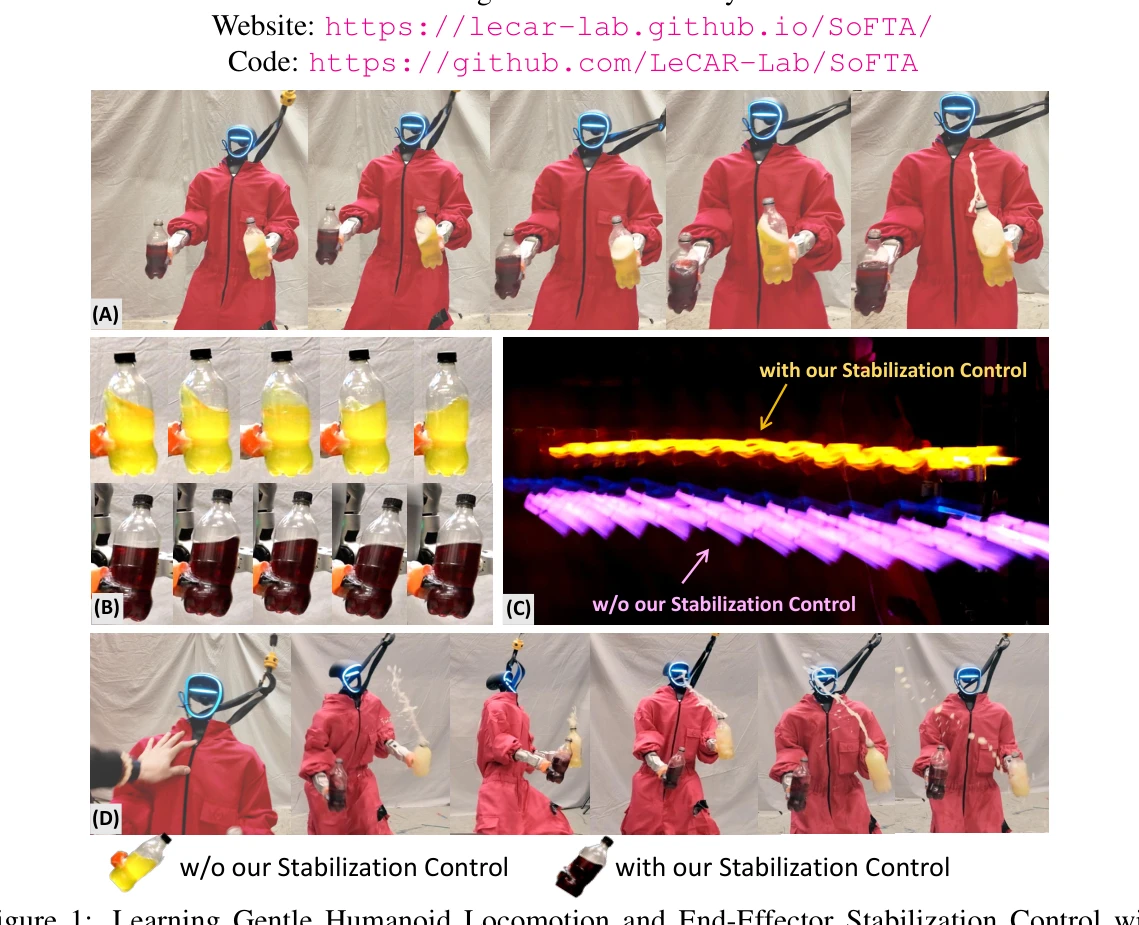
Figure 1: Learning Gentle Humanoid Locomotion and End-Effector Stabilization Control with
휴머노이드 로봇이 음료를 들고 걸을 때 흘리지 않도록 상체와 하체를 분리된 에이전트로 제어하는 SoFTA 프레임워크를 제안하여, 느린 보행 제어와 빠른 end-effector 안정화를 동시에 달성한다.
저자: Yitang Li, Yuanhang Zhang, Wenli Xiao, Chaoyi Pan, Haoyang Weng, Guanqi He, Tairan He, Guanya Shi | 날짜: 2025-05-30 | URL: https://arxiv.org/abs/2505.24198 📄 PDF
Figure 1: Learning Gentle Humanoid Locomotion and End-Effector Stabilization Control with
휴머노이드 로봇이 음료를 들고 걸을 때 흘리지 않도록 상체와 하체를 분리된 에이전트로 제어하는 SoFTA 프레임워크를 제안하여, 느린 보행 제어와 빠른 end-effector 안정화를 동시에 달성한다.
Figure 1: Learning Gentle Humanoid Locomotion and End-Effector Stabilization Control with
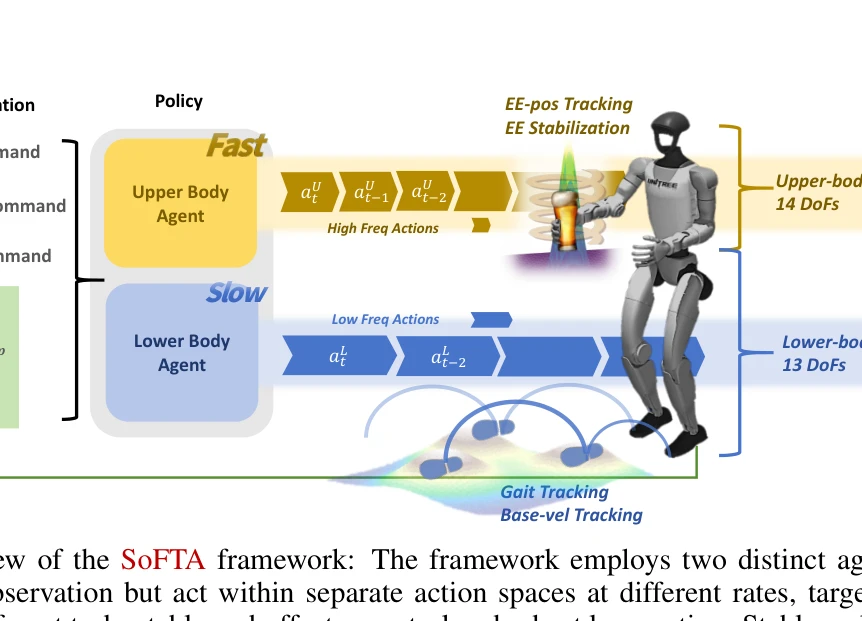
Figure 2: Overview of the SoFTA framework: The framework employs two distinct agents that
총평: 이 논문은 휴머노이드의 보행 중 end-effector 안정화라는 중요하면서도 미해결 문제를 frequency separation과 decoupled control로 우아하게 해결한 창의적 접근법을 제시하며, 실세계 배포로 실용성을 입증한 뛰어난 연구이다.