Essence
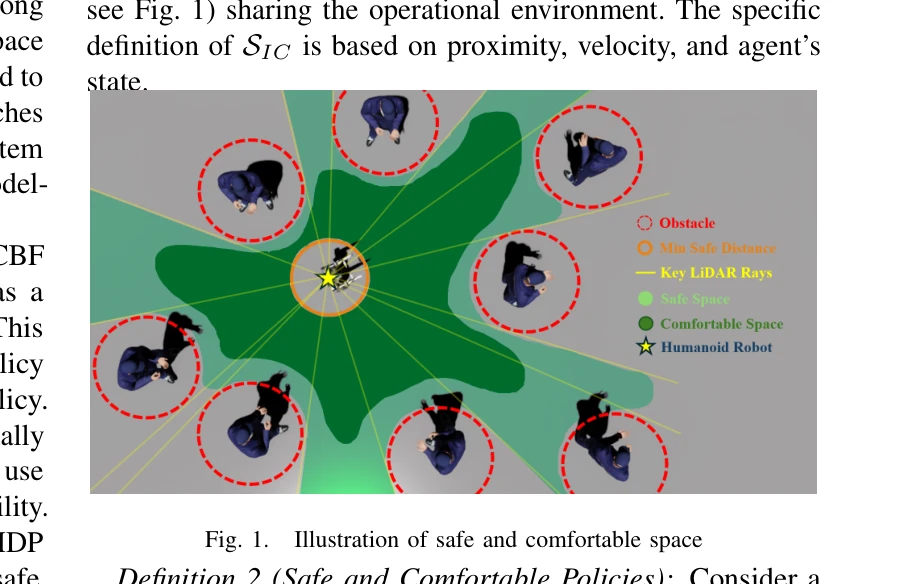
Fig. 1.
휴머노이드 로봇의 안전하고 편안한 네비게이션을 위해 LiDAR 포인트 클라우드를 모터 커맨드로 직접 매핑하는 end-to-end 정책을 제시하며, CMDP 프레임워크에서 CBF 원리를 비용 함수로 변환하여 P3O로 안전 제약을 강제한다.
저자: Zifan Wang, Xun Yang, Jianzhuang Zhao, Jiaming Zhou, Teli Ma, Ziyao Gao, Arash Ajoudani, Junwei Liang | 날짜: 2025-08-11 | URL: https://arxiv.org/abs/2508.07611 📄 PDF
Fig. 1.
휴머노이드 로봇의 안전하고 편안한 네비게이션을 위해 LiDAR 포인트 클라우드를 모터 커맨드로 직접 매핑하는 end-to-end 정책을 제시하며, CMDP 프레임워크에서 CBF 원리를 비용 함수로 변환하여 P3O로 안전 제약을 강제한다.
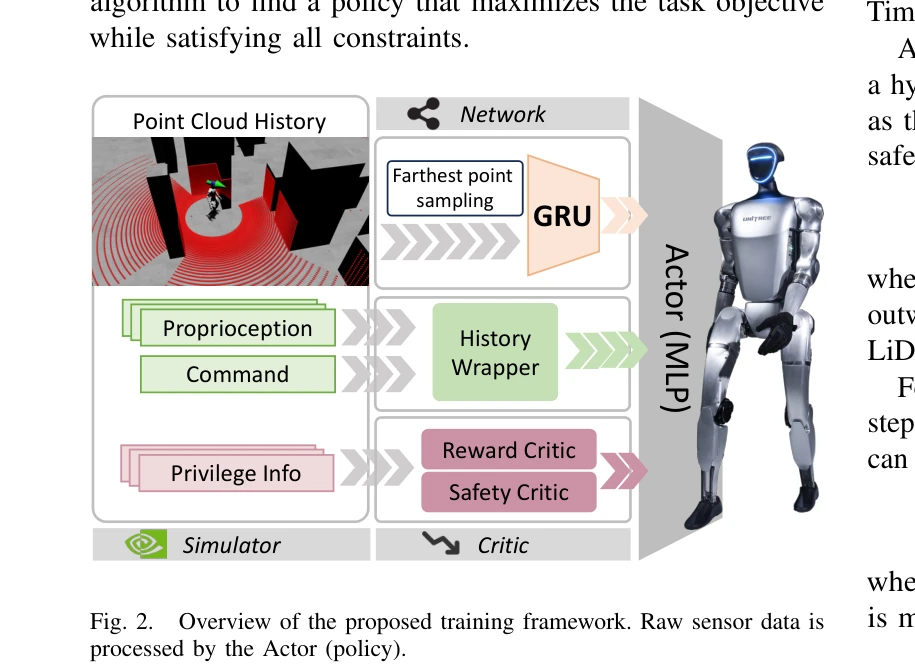
Fig. 2.
총평: 본 논문은 LiDAR 기반 end-to-end 정책, CBF-CMDP-P3O 통합 프레임워크, HRI 기반 편안함 설계를 통해 휴머노이드 로봇의 안전하고 사회적으로 수용 가능한 네비게이션 문제를 종합적으로 해결한 강력한 기여를 제시한다. 형식적 안전 보장과 실제 배포의 균형을 잘 맞추었으며, 다만 비선형 동역학과 도메인 갭 분석 강화가 필요하다.