Achievement
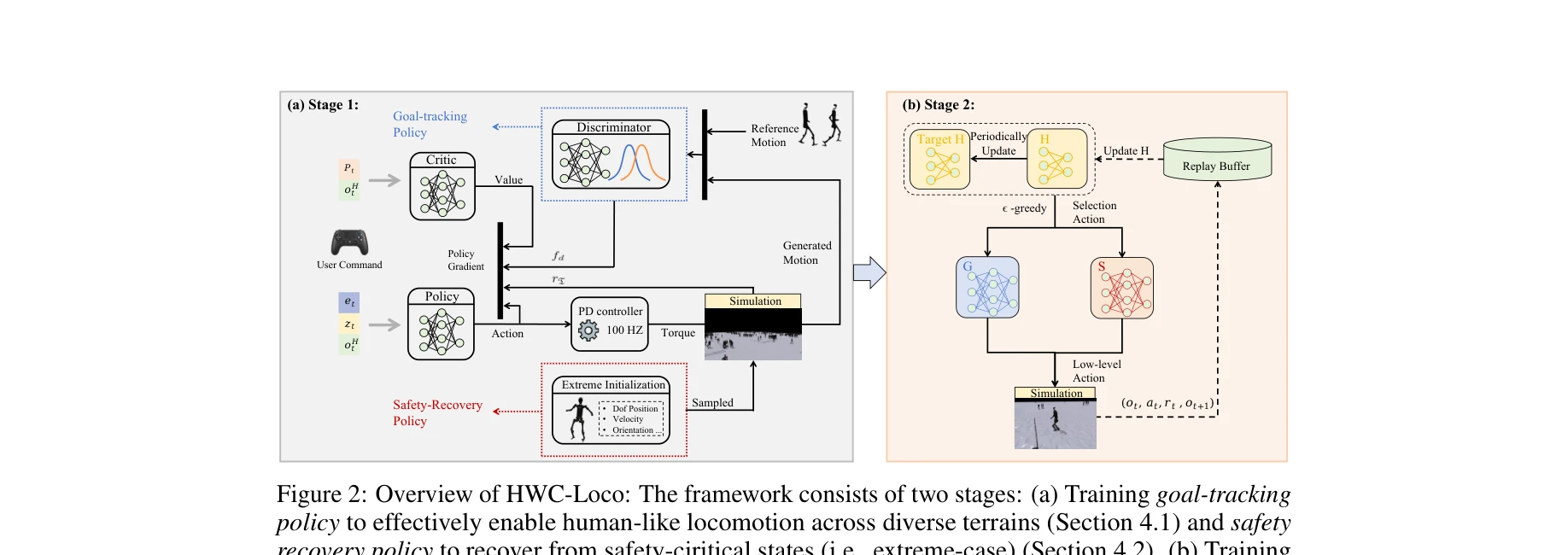
Figure 2: Overview of HWC-Loco: The framework consists of two stages: (a) Training goal-tracking
- 계층적 정책 구조: Goal-tracking과 safety-recovery를 분리하고 high-level planning으로 동적 선택 메커니즘 도입
- Robust optimization 공식화: 환경 동역학 불일치 하에서의 정책 학습을 명시적 robust optimization 문제로 재정의
- 인간 행동 정렬: Distributional alignment를 통해 학습된 정책을 인간 모션 선호도에 맞춤
- 광범위한 검증: 다양한 지형, 로봇 구조, 외부 교란 상황에서 시뮬레이션 및 실제 환경 모두에서 성능 입증