Essence
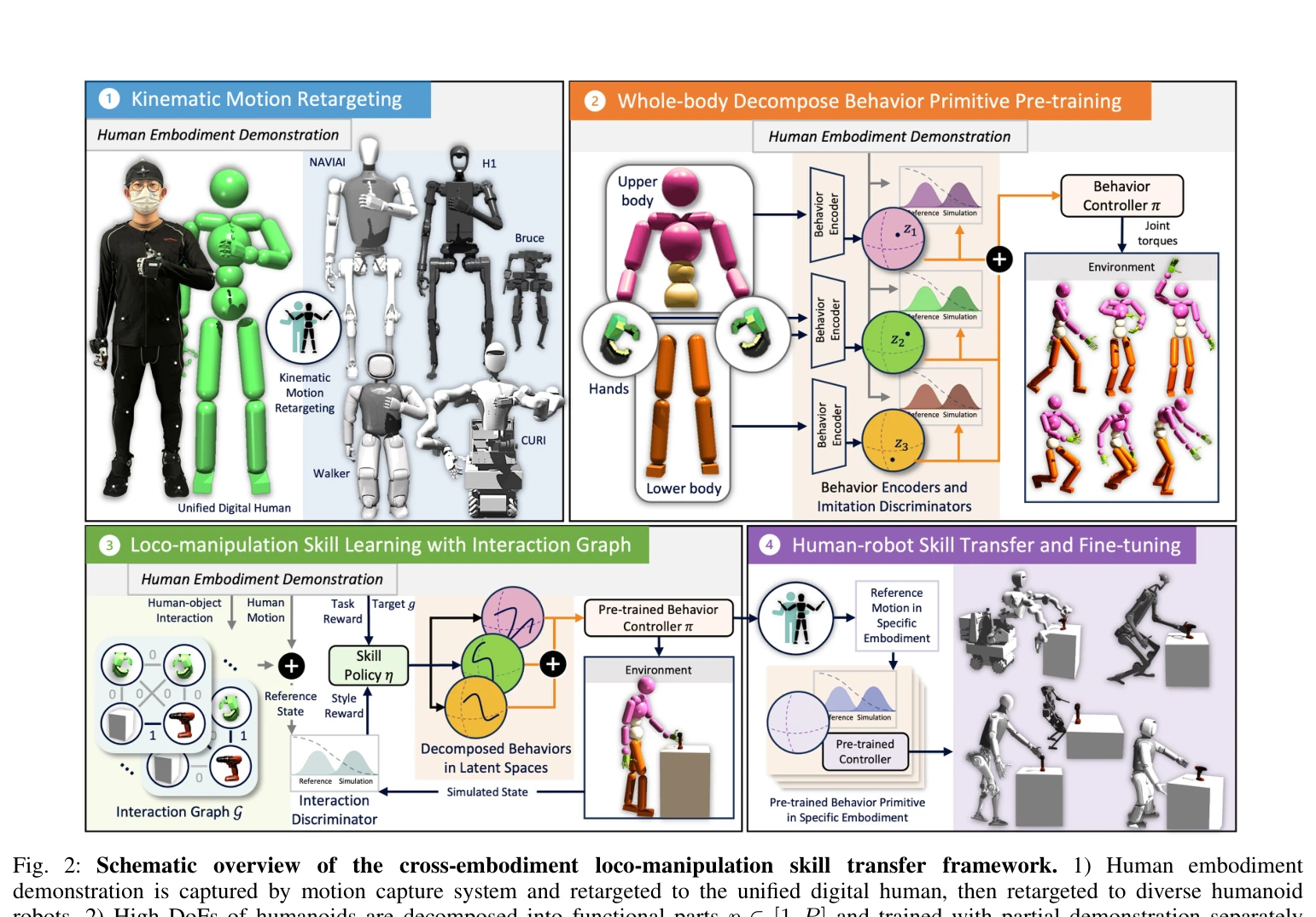
Fig. 2: Schematic overview of the cross-embodiment loco-manipulation skill transfer framework. 1) Human embodiment
Unified Digital Human (UDH) 모델을 공통 프로토타입으로 사용하여 인간 시연에서 행동 원시 요소를 학습하고, 분해된 adversarial imitation learning과 kinematic motion retargeting을 통해 다양한 휴머노이드 로봇 플랫폼으로 로코-매니퓰레이션 스킬을 효율적으로 전이한다.