Essence
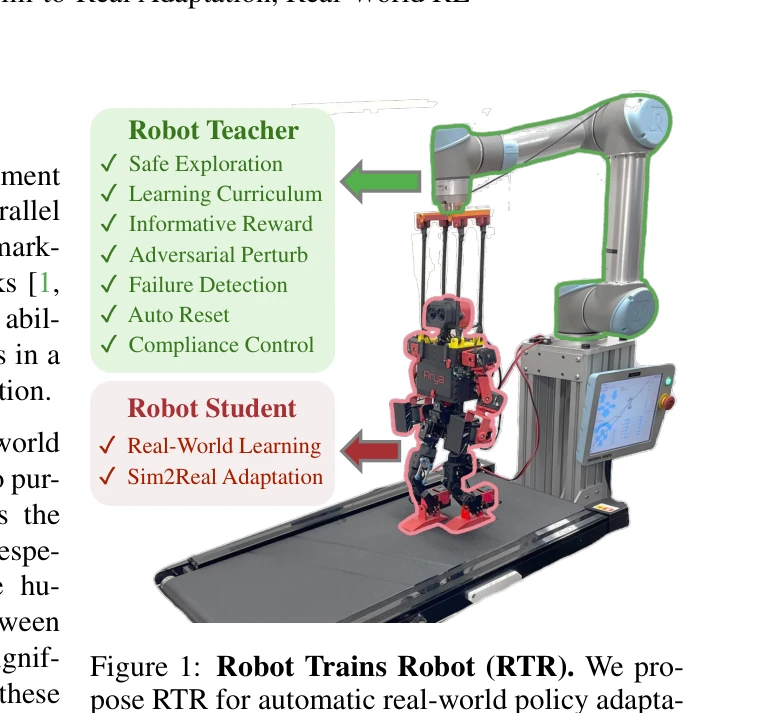
Figure 1: Robot Trains Robot (RTR). We pro-
로봇 팔(teacher)이 휴머노이드 로봇(student)을 지원하고 가이드하는 Robot-Trains-Robot(RTR) 프레임워크를 제안하여, 안전하고 효율적인 실제 환경에서의 휴머노이드 학습을 가능하게 한다. Dynamics-encoded latent variable 최적화를 통한 sim-to-real 전이 방법을 함께 제안한다.
저자: Kaizhe Hu, Haochen Shi, Yao He, Weizhuo Wang, C. Karen Liu, Shuran Song | 날짜: 2025-08-17 | URL: https://arxiv.org/abs/2508.12252 📄 PDF
Figure 1: Robot Trains Robot (RTR). We pro-
로봇 팔(teacher)이 휴머노이드 로봇(student)을 지원하고 가이드하는 Robot-Trains-Robot(RTR) 프레임워크를 제안하여, 안전하고 효율적인 실제 환경에서의 휴머노이드 학습을 가능하게 한다. Dynamics-encoded latent variable 최적화를 통한 sim-to-real 전이 방법을 함께 제안한다.
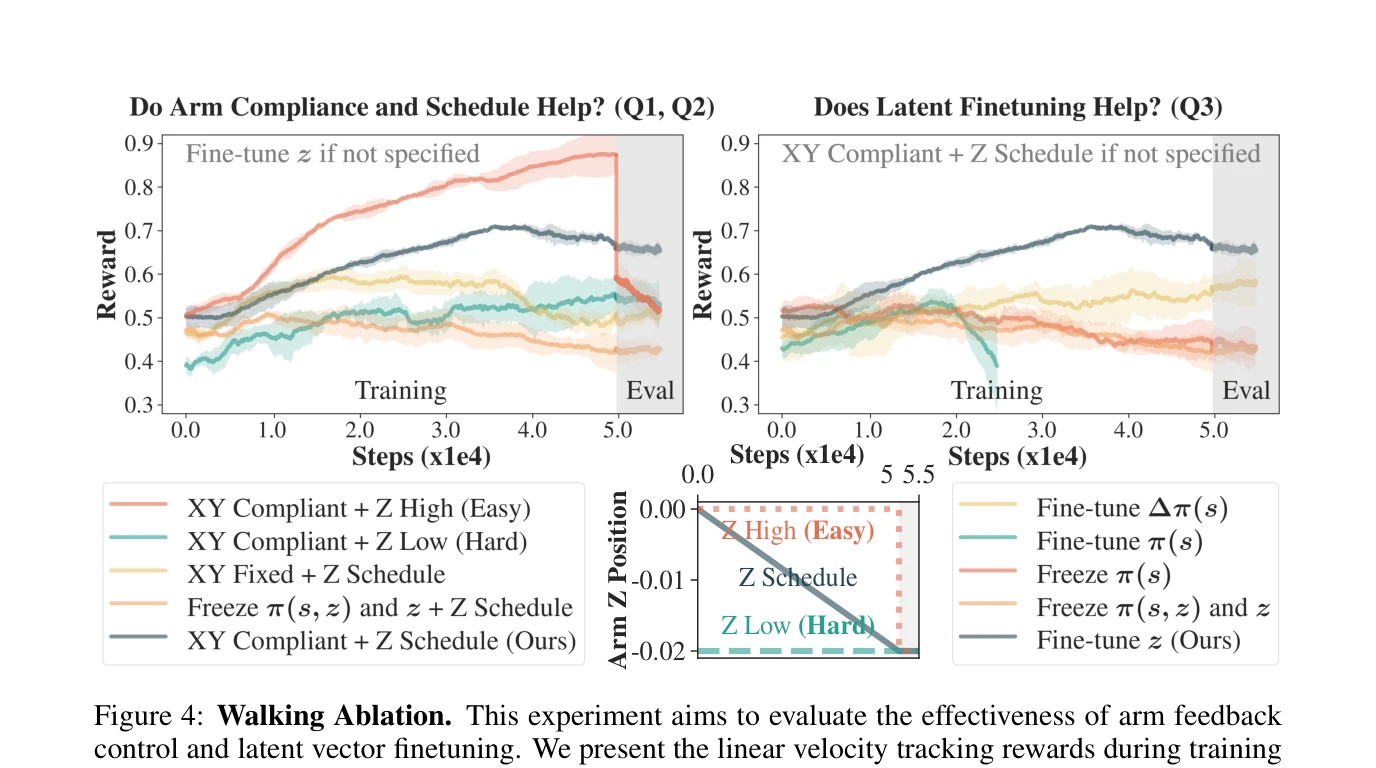
Figure 4: Walking Ablation. This experiment aims to evaluate the effectiveness of arm feedback
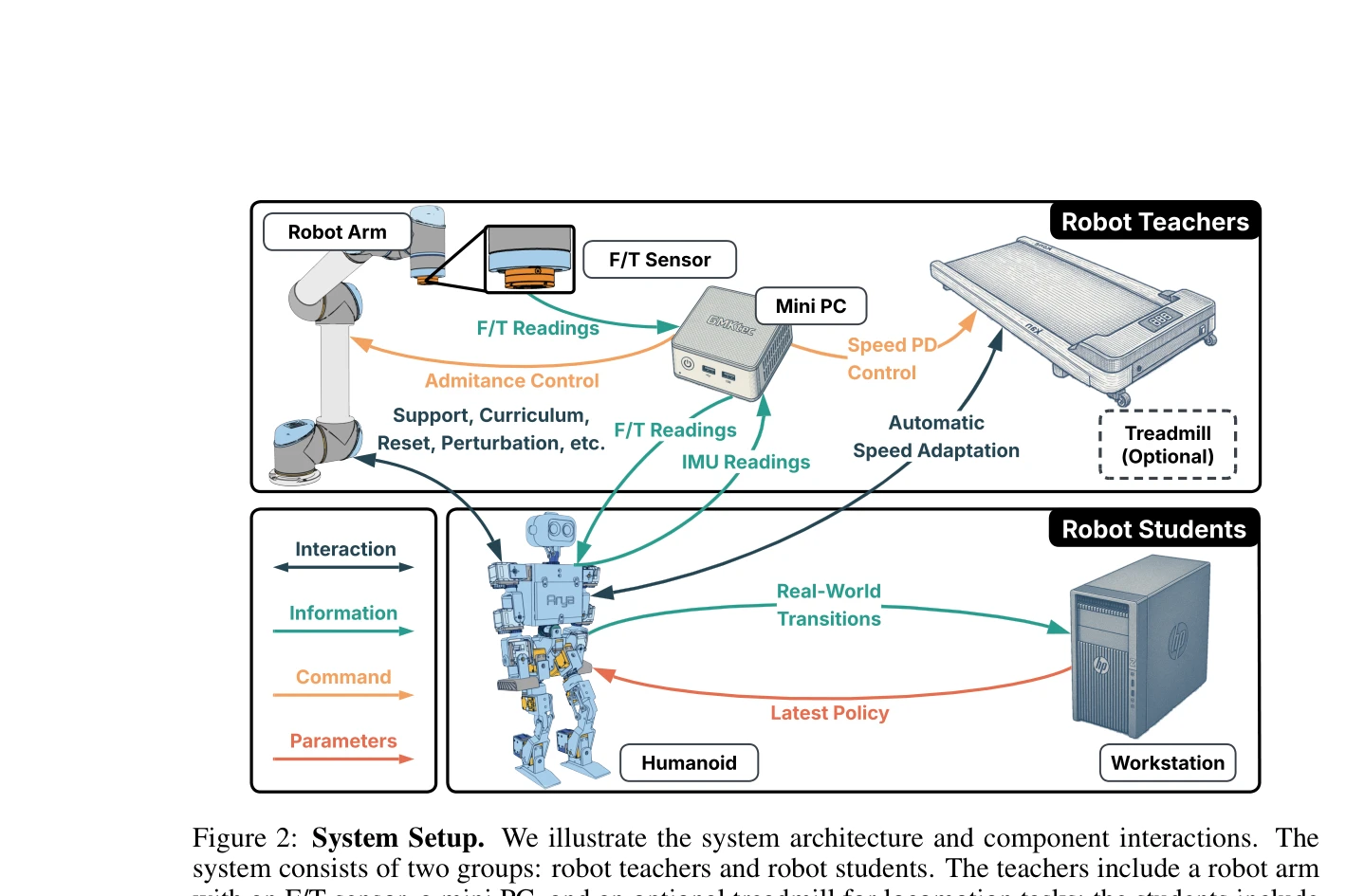
Figure 2: System Setup. We illustrate the system architecture and component interactions. The
총평: 실제 환경에서의 휴머노이드 학습이라는 중요하면서도 실제로 구현되지 않았던 문제에 대해, 혁신적인 teacher-robot 지원 방식과 효율적 sim-to-real 알고리즘을 결합하여 실질적인 해결책을 제시한다. 실험적 검증과 전반적 설계의 견고성이 우수하지만, 제한된 플랫폼과 태스크에서의 검증이라는 한계가 있다.