Essence
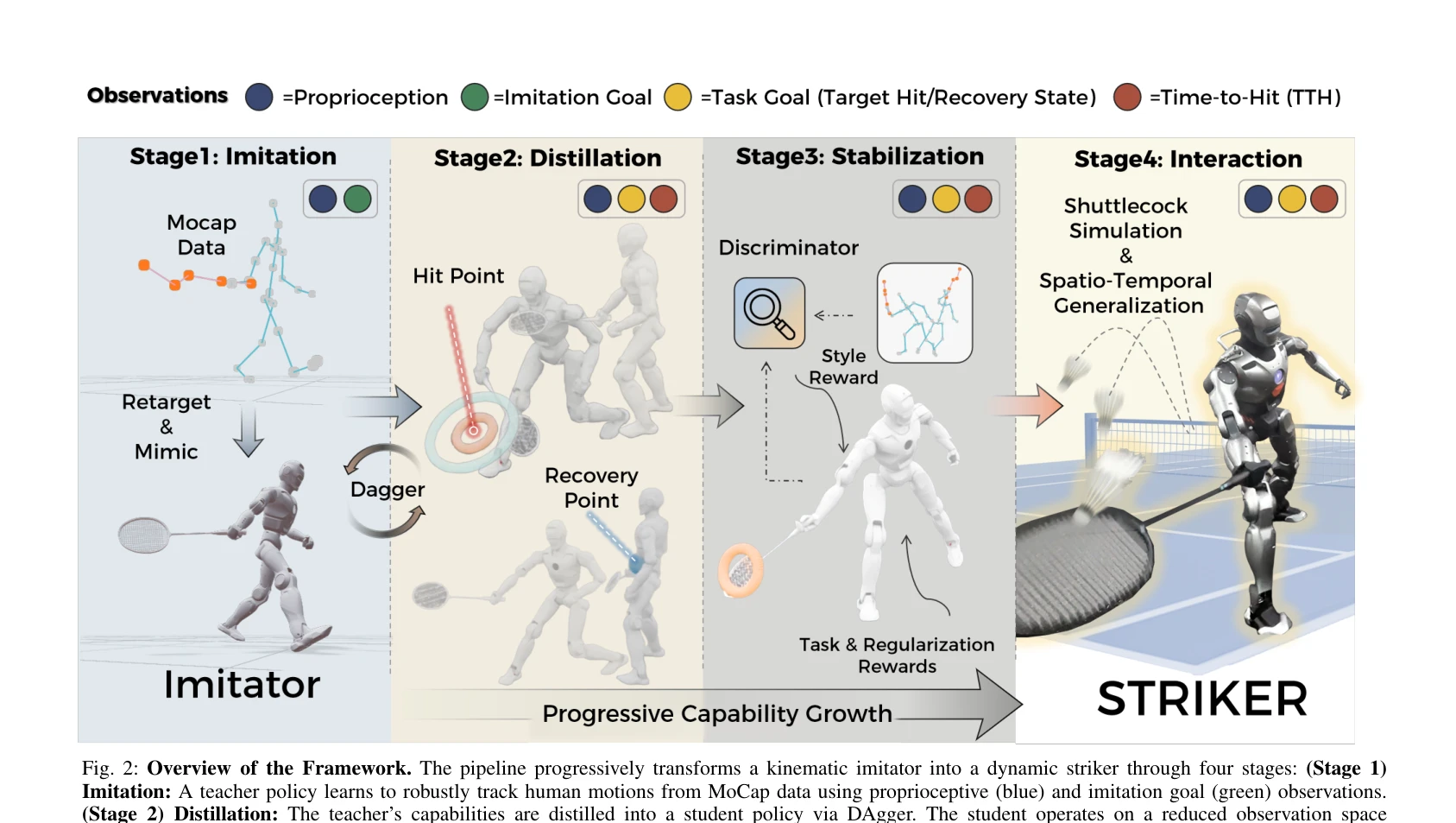
Fig. 2: Overview of the Framework. The pipeline progressively transforms a kinematic imitator into a dynamic striker thr
휴머노이드 로봇이 배드민턴 기술을 습득하도록 하는 Imitation-to-Interaction 점진적 강화학습 프레임워크를 제안하며, 시뮬레이션에서 실제 로봇으로의 제로샷 sim-to-real 전이를 달성했다.
저자: Yeke Chen, Shihao Dong, Xiaoyu Ji, Jingkai Sun, Zeren Luo, Liu Zhao, Jiahui Zhang, Wanyue Li, Ji Ma, Bowen Xu, Yimin Han, Yudong Zhao, Peng Lu | 날짜: 2026-02-09 | DOI: 10.48550/arXiv.2602.08370 📄 PDF
Fig. 2: Overview of the Framework. The pipeline progressively transforms a kinematic imitator into a dynamic striker thr
휴머노이드 로봇이 배드민턴 기술을 습득하도록 하는 Imitation-to-Interaction 점진적 강화학습 프레임워크를 제안하며, 시뮬레이션에서 실제 로봇으로의 제로샷 sim-to-real 전이를 달성했다.
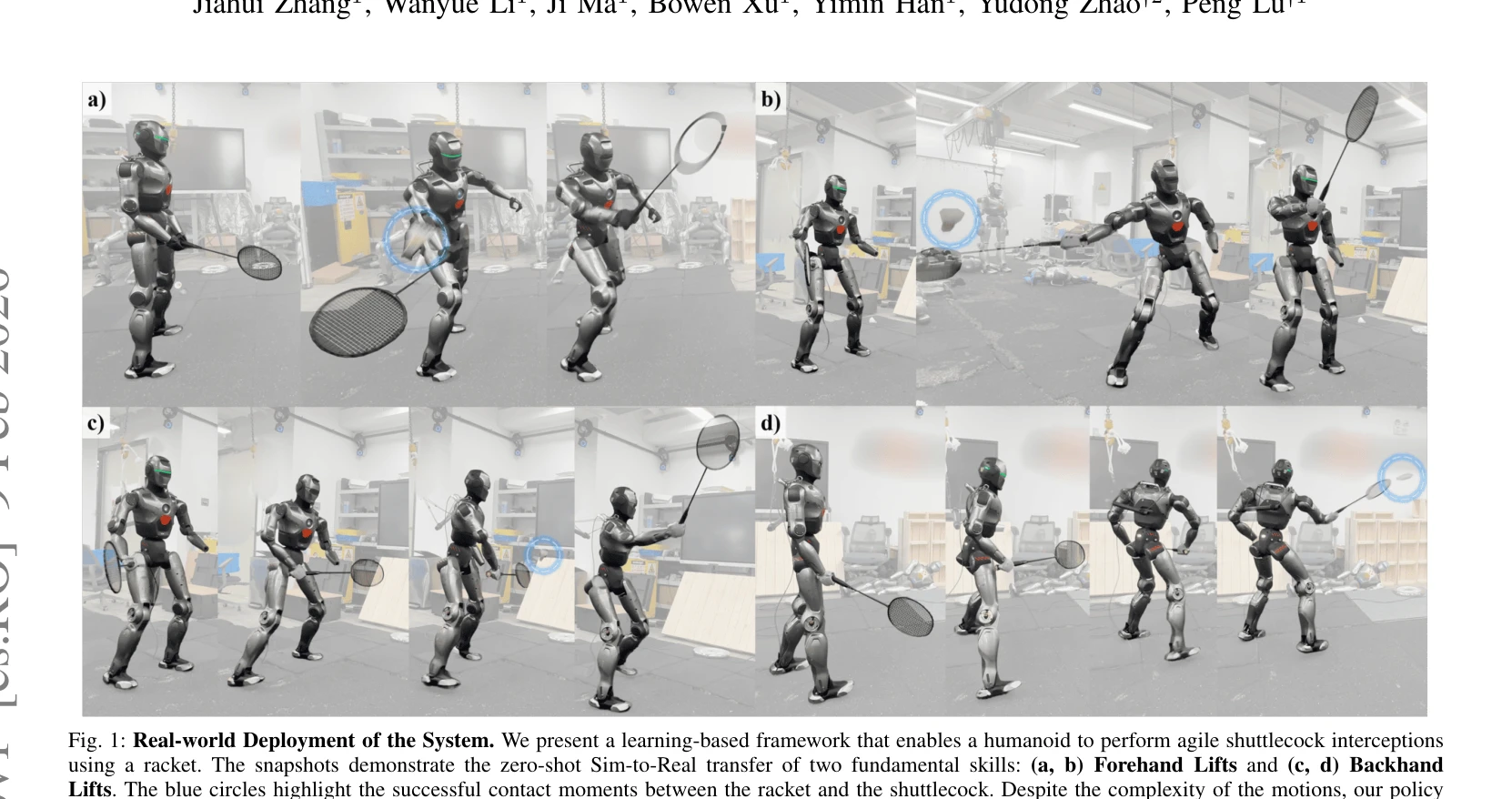
Fig. 1: Real-world Deployment of the System. We present a learning-based framework that enables a humanoid to perform ag
Fig. 2: Overview of the Framework. The pipeline progressively transforms a kinematic imitator into a dynamic striker thr
총평: 휴머노이드 로봇 스포츠 제어의 새로운 경계를 개척한 혁신적 연구로, Imitation-to-Interaction 프레임워크와 manifold expansion 전략은 희소한 전문가 데이터에서 고도로 정밀하고 인간다운 운동을 학습하는 강력한 솔루션을 제시한다. 제로샷 sim-to-real 전이의 성공은 실용적 가치가 높으나, 상대방 상호작용과 환경 변동성 측면의 제한이 남아 있다.