Essence
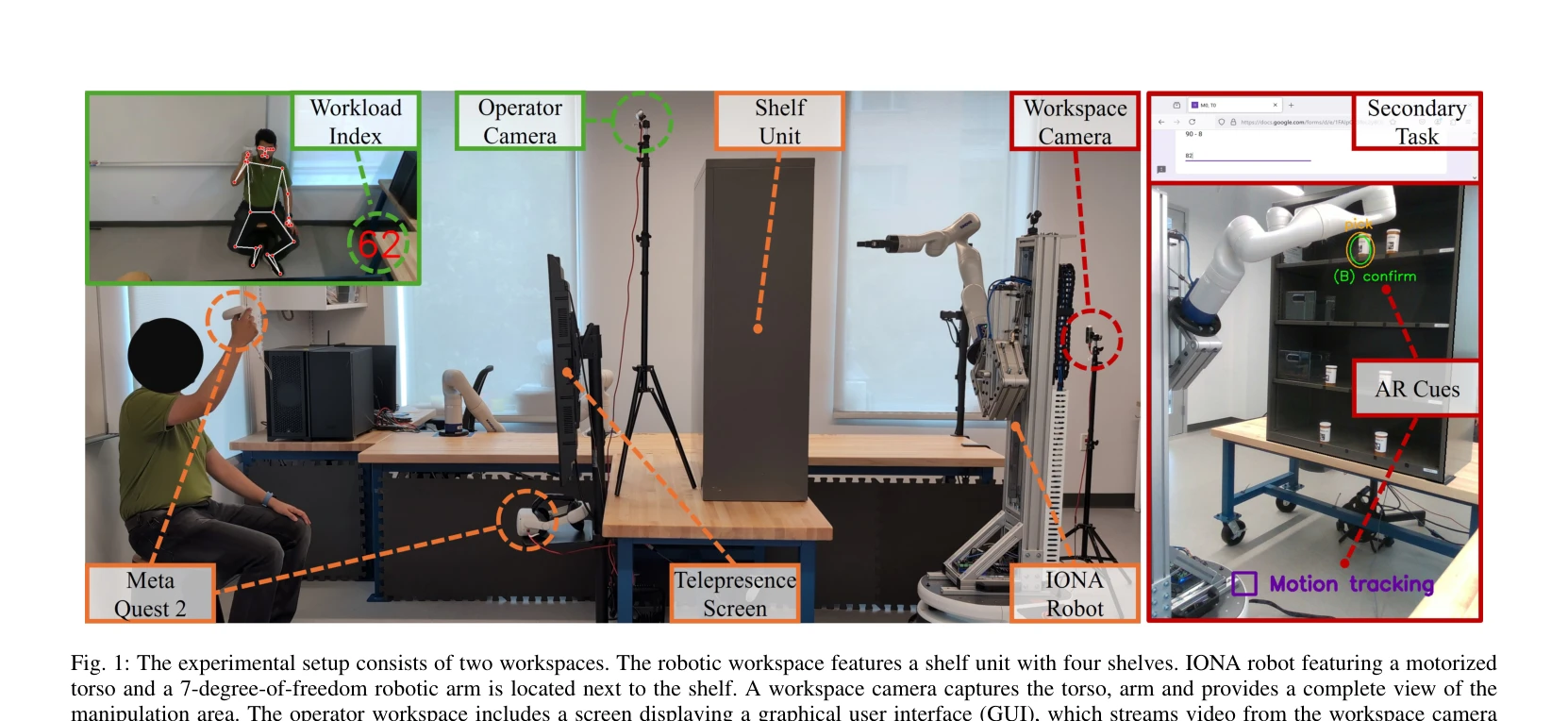
Fig. 1: The experimental setup consists of two workspaces. The robotic workspace features a shelf unit with four shelves
원격 제어되는 모바일 휴머노이드 로봇의 몸통-팔 협력 제어를 위해 인간-로봇 협업(HRC) 방법들을 제안하고, 사용자 연구(N=17)를 통해 자동 및 수동 제어 방식의 효과를 비교 평가한다.
저자: Nikita Boguslavskii, Lorena Maria Genua, Zhi Li | 날짜: 2025-05-09 | URL: https://arxiv.org/abs/2505.05773 📄 PDF
Fig. 1: The experimental setup consists of two workspaces. The robotic workspace features a shelf unit with four shelves
원격 제어되는 모바일 휴머노이드 로봇의 몸통-팔 협력 제어를 위해 인간-로봇 협업(HRC) 방법들을 제안하고, 사용자 연구(N=17)를 통해 자동 및 수동 제어 방식의 효과를 비교 평가한다.
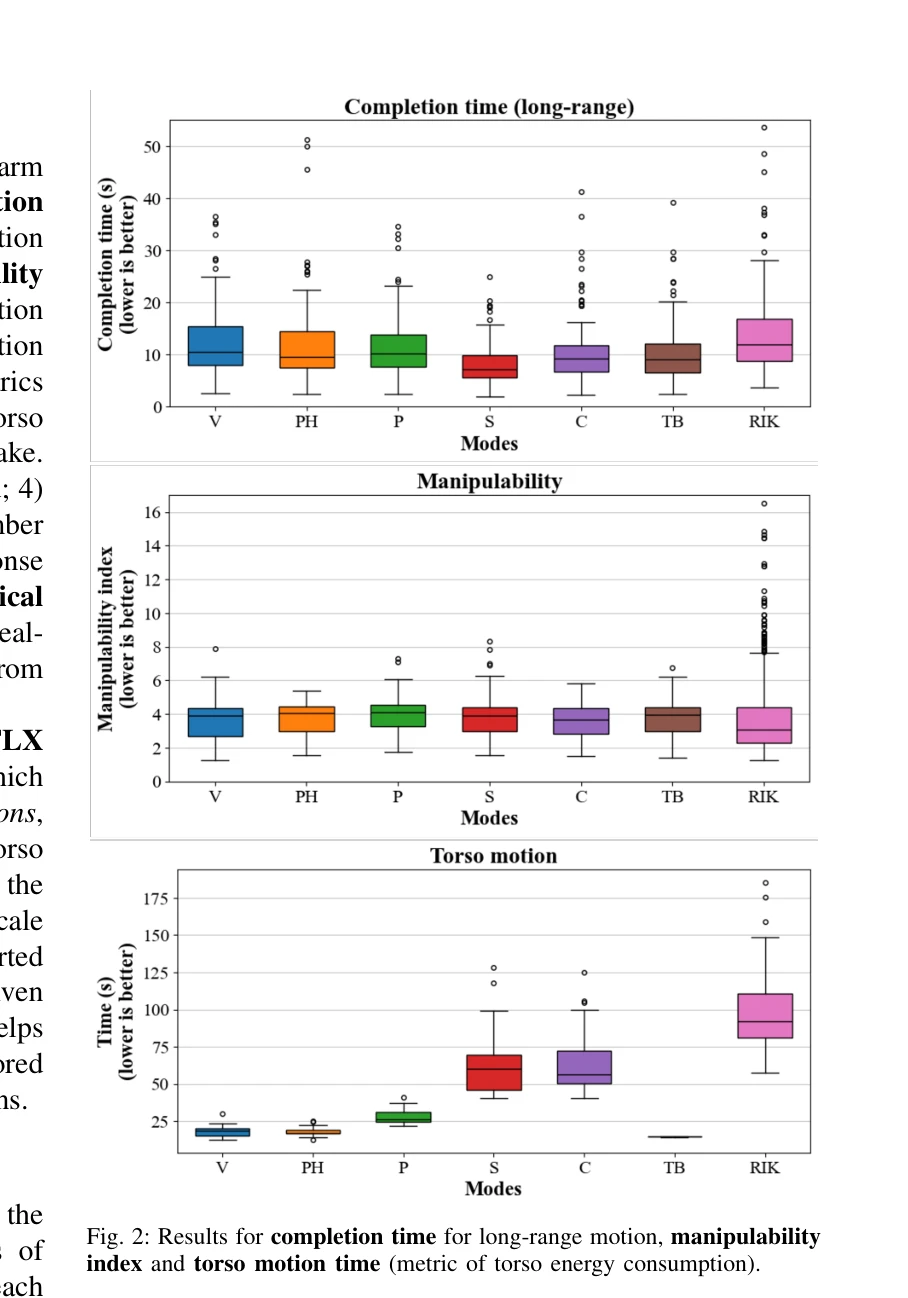
Fig. 2: Results for completion time for long-range motion, manipulability
Fig. 1: The experimental setup consists of two workspaces. The robotic workspace features a shelf unit with four shelves
총평: 원격 조종 휴머노이드 로봇의 몸통-팔 협력 문제에 대한 체계적이고 실용적인 HRC 솔루션을 제시하며, 사용자 중심의 평가를 통해 상황별 최적 제어 방식을 제공하는 의의 있는 연구이다. 다만 표본 크기와 실제 환경 검증의 확대가 필요하다.