Essence
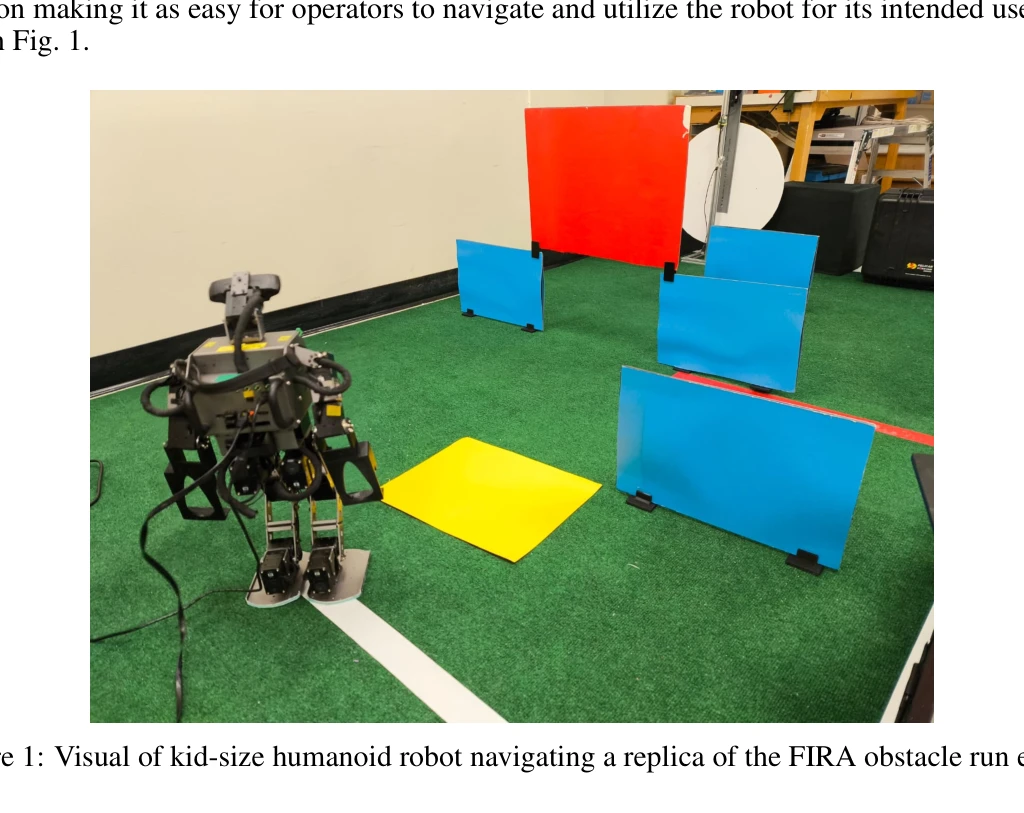
Figure 1: Visual of kid-size humanoid robot navigating a replica of the FIRA obstacle run event.
FIRA HuroCup 경기에서 비전문가 운영자가 인형형 로봇을 텔레조작할 수 있도록 사용자 친화적인 GUI를 개발했다. HTML, CSS, JavaScript를 사용하여 직관적인 인터페이스를 반복적으로 설계하고 테스트했다.
저자: Austin Barret, Meng Cheng Lau | 날짜: 2025-10-15 | URL: https://arxiv.org/abs/2510.13594 📄 PDF
Figure 1: Visual of kid-size humanoid robot navigating a replica of the FIRA obstacle run event.
FIRA HuroCup 경기에서 비전문가 운영자가 인형형 로봇을 텔레조작할 수 있도록 사용자 친화적인 GUI를 개발했다. HTML, CSS, JavaScript를 사용하여 직관적인 인터페이스를 반복적으로 설계하고 테스트했다.
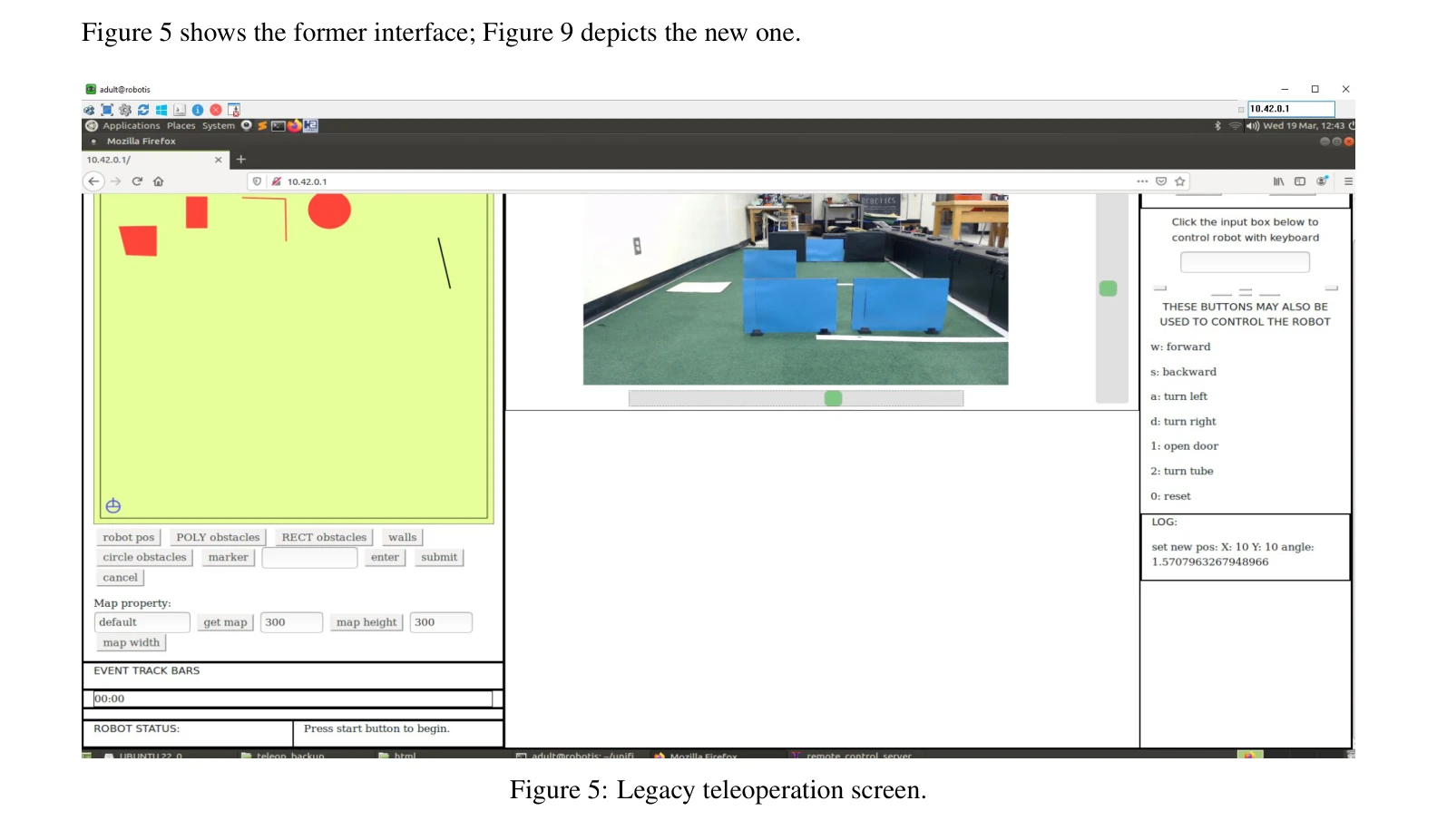
Figure 5 shows the former interface; Figure 9 depicts the new one.
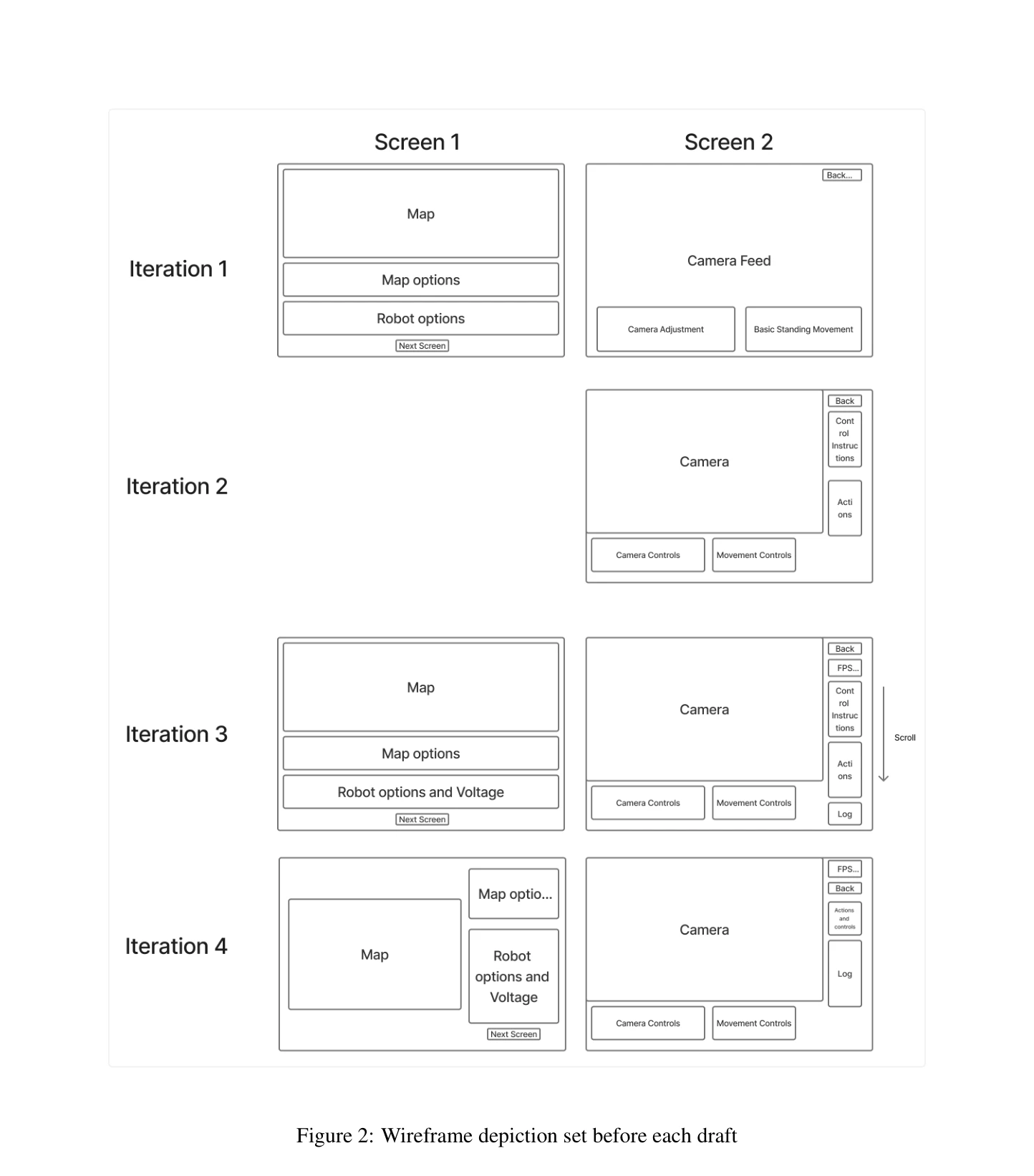
Figure 2: Wireframe depiction set before each draft
총평: 본 연구는 경합 환경에서 실제로 필요한 비전문가 중심의 텔로봇 GUI를 반복적 개발 방식으로 체계적으로 구축한 의미 있는 실무 기여이다. 다만 외부 사용자 평가 부재로 주장의 일반화 가능성이 제한되며, 향후 형식적인 사용성 평가를 통한 정량적 검증이 필요하다.