Essence
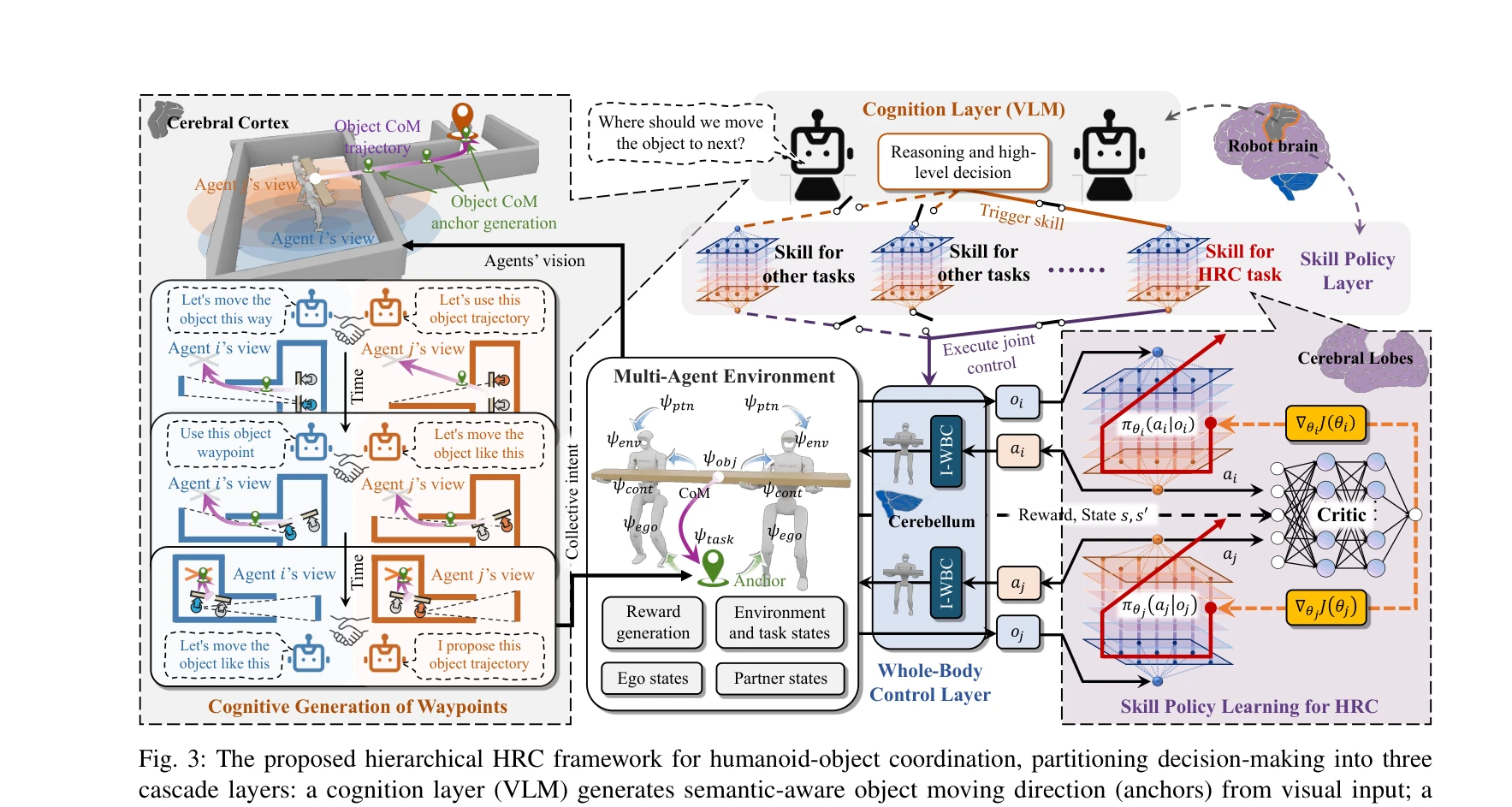
Fig. 3: The proposed hierarchical HRC framework for humanoid-object coordination, partitioning decision-making into thre
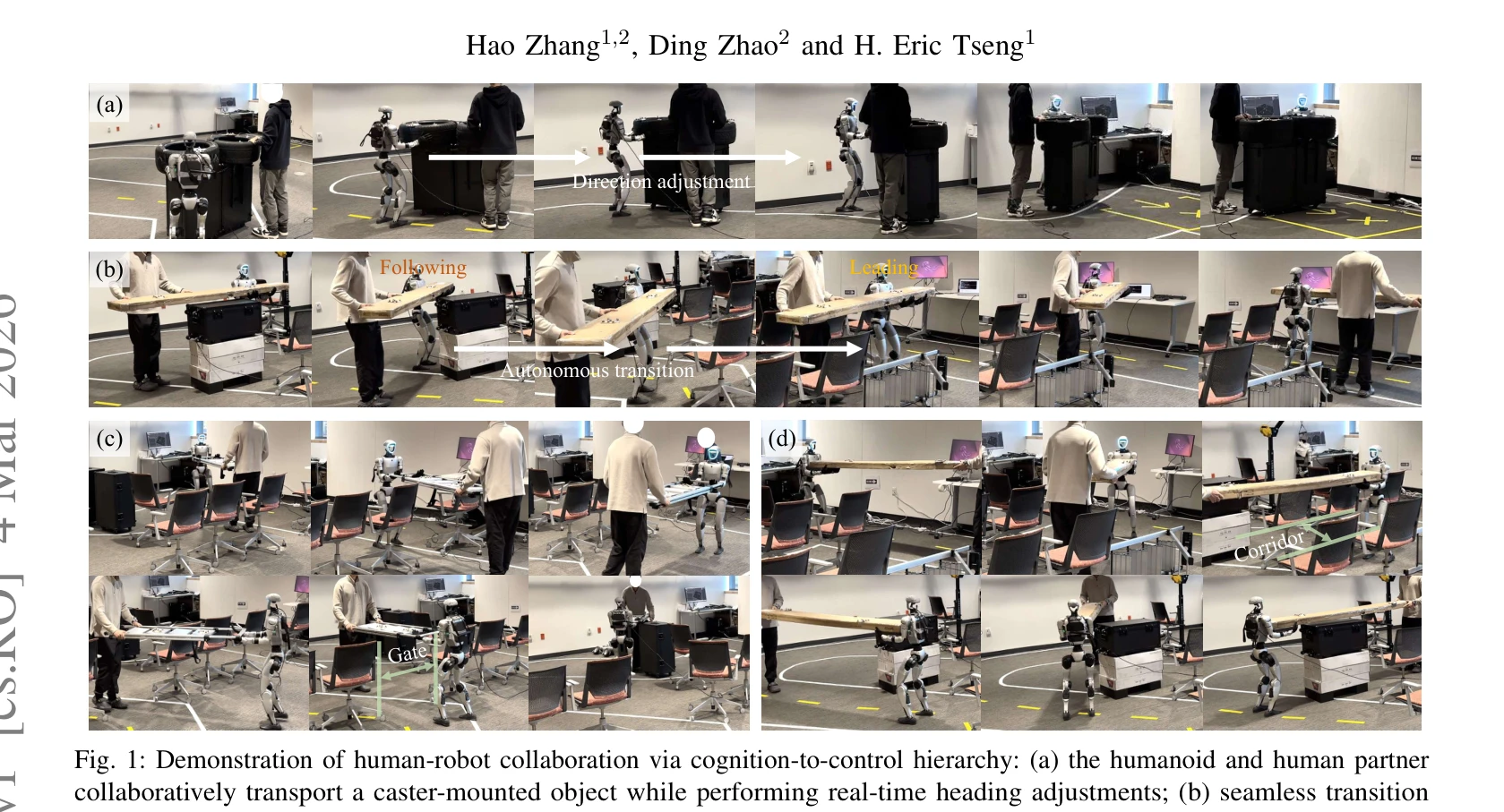
인간-휴머노이드 협업 운반을 위한 3계층 Cognition-to-Control 프레임워크로, VLM 기반 의미론적 추론, Markov potential game 기반 MARL 조정, 전신 제어를 통합하여 역할의 자동 형성과 강건한 협업을 실현한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 인간-로봇 협업의 근본적인 인지-제어 단절 문제를 3계층 구조로 체계적으로 해결하고, Markov potential game MARL을 통해 명시적 역할 할당 없이 협업 역할이 자동 형성되는 novel 접근법을 제시한다. 실험 결과는 강건성과 유효성을 잘 보여주지만, 작업 다양성 및 환경 조건 범위 확대가 필요하다.