Essence
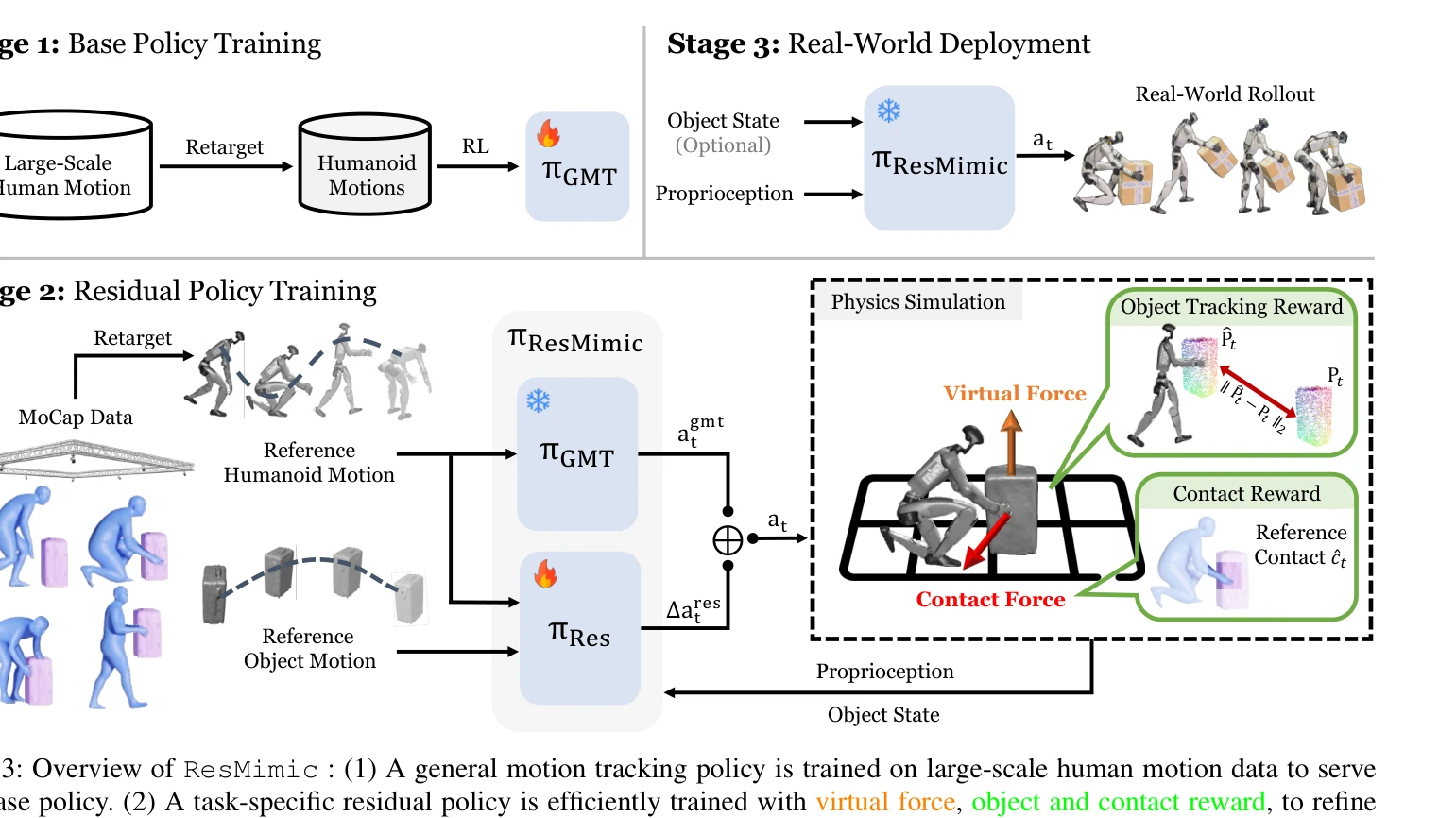
Fig. 3: Overview of ResMimic : (1) A general motion tracking policy is trained on large-scale human motion data to serve
ResMimic는 일반 모션 추적(GMT) 정책을 기반으로 효율적인 잔차 정책(residual policy)을 학습하여 인간형 로봇의 정밀한 전신 이동-조작 능력을 실현하는 이단계 잔차학습 프레임워크이다.
저자: Siheng Zhao, Yanjie Ze, Yue Wang, C. Karen Liu, Pieter Abbeel, Guanya Shi, Rocky Duan | 날짜: 2025-10-08 | DOI: 10.48550/arXiv.2510.05070 📄 PDF
Fig. 3: Overview of ResMimic : (1) A general motion tracking policy is trained on large-scale human motion data to serve
ResMimic는 일반 모션 추적(GMT) 정책을 기반으로 효율적인 잔차 정책(residual policy)을 학습하여 인간형 로봇의 정밀한 전신 이동-조작 능력을 실현하는 이단계 잔차학습 프레임워크이다.
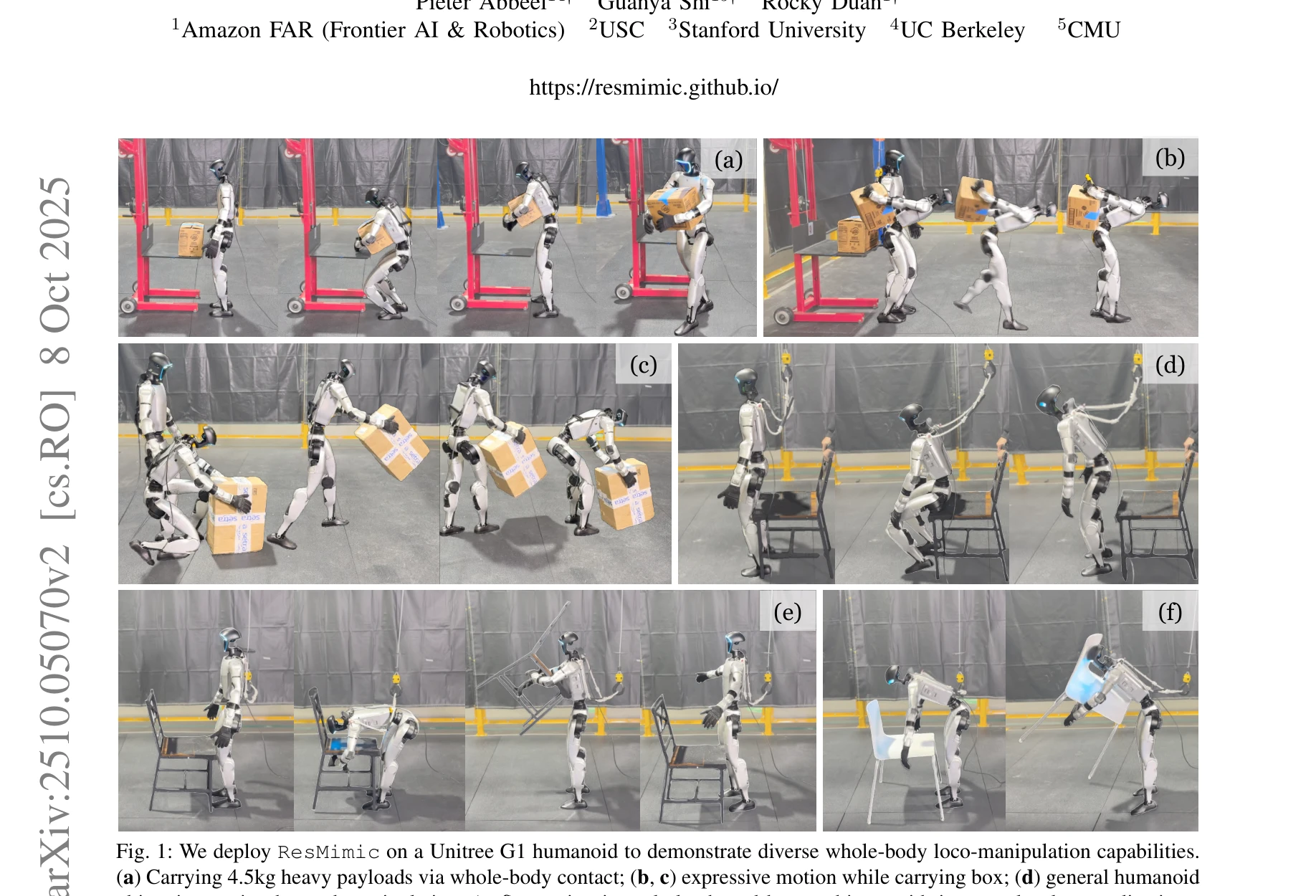
Fig. 1: We deploy ResMimic on a Unitree G1 humanoid to demonstrate diverse whole-body loco-manipulation capabilities.
Fig. 3: Overview of ResMimic : (1) A general motion tracking policy is trained on large-scale human motion data to serve
총평: ResMimic는 대규모 사전훈련 GMT 정책과 효율적 잔차 정책의 결합으로 인간형 로봇의 정밀한 전신 이동-조작을 실현한 혁신적 프레임워크이며, 맞춤형 보상 설계와 광범위한 실증으로 인간형 로봇 제어 분야에 중요한 기여를 한다.